

21. Условия равновесия пар.
У словия
равновесия пространственной системы
пар, запишутся:
словия
равновесия пространственной системы
пар, запишутся:
Если
в результате сложения пар ,![]() то действующие на тело пары образуют
уравновешенную систему. Следовательно,
необходимое и достаточное условие
равновесия системы пар выражается одним
уравнением
то действующие на тело пары образуют
уравновешенную систему. Следовательно,
необходимое и достаточное условие
равновесия системы пар выражается одним
уравнением
![]() ,т. е. для равновесия системы пар сил,
действующих на тело в одной плоскости,
необходимо и достаточно, чтобы
алгебраическая сумма их моментов была
равна нулю. Значит, систему пар или одну
пару можно уравновесить только парой.
,т. е. для равновесия системы пар сил,
действующих на тело в одной плоскости,
необходимо и достаточно, чтобы
алгебраическая сумма их моментов была
равна нулю. Значит, систему пар или одну
пару можно уравновесить только парой.
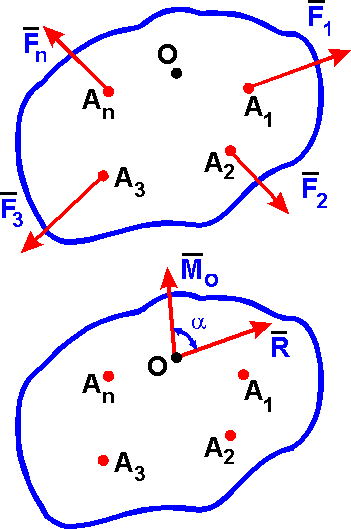
22. Приведение силы к заданному центру.
Теорема о параллельном переносе силы: силу F, не изменяя ее действие на абсолютно твердое тело, можно переносить из данной точки (А) в любую другую точку (О) тела, прибавляя при этом пару с моментом (m), равным моменту переносимой силы относительно точки (О), куда сила переносится [m = mo (F)]; F F, m. Приведение системы сил F1, F2, ..., Fn к произвольном центру (точке) О, т. е. замене данной системы сил другой эквивалентной более простой, происходит с помощью Теоремы Пуансо: любая система сил F1, F2, ..., Fn действующих на абсолютно твердое тело, при приведении к произвольному центру О заменяется одной силой R, равной главному вектору системы сил, приложенной в центре О и парой сил с моментом Mo, равным главному моменту системы сил относительно центра (точки) О. Главный вектор:
R = F1 + F2 + ... + Fn = ∑Fk, (k = 1, 2, ..., n) |
а главный момент системы сил относительно центра (точки) О:
Mo = m1 + m2 + ... + mn = mo(F1) + mo(F2) + ... + mo(Fn) = mo(Fk). (k = 1, 2, ..., n) |
 Величина главного
вектора R
не зависит от выбора центра О,
а значение главного момента Mo
при изменении положения центра О
может в общем случае изменяться.
Для плоской системы сил F1,
F2,
..., Fn
главный вектор R
лежит в плоскости действия сил, а главный
момент перпендикулярен этой плоскости
( = 90). Поэтому главный момент плоской
системы сил относительно центра О
определяется как сумма алгебраических
моментов сил относительно точки (центра)
О:
Mo
= mo(Fk),
(k = 1, 2, ..., n) и изображается на плоскости
дуговой стрелкой.
Величина главного
вектора R
не зависит от выбора центра О,
а значение главного момента Mo
при изменении положения центра О
может в общем случае изменяться.
Для плоской системы сил F1,
F2,
..., Fn
главный вектор R
лежит в плоскости действия сил, а главный
момент перпендикулярен этой плоскости
( = 90). Поэтому главный момент плоской
системы сил относительно центра О
определяется как сумма алгебраических
моментов сил относительно точки (центра)
О:
Mo
= mo(Fk),
(k = 1, 2, ..., n) и изображается на плоскости
дуговой стрелкой.
23. Приведение произвольной системы сил к силе и паре сил ( основная теорема статики). Теорема Пуансо.
Пусть дана произвольная система сил (F1, F2,..., Fn). Сумма этих сил F=åFk - главный вектор системы сил. Сумма моментов сил относительно какого-либо полюса - главный момент рассматриваемой системы сил относительно этого полюса. Осн теор статики (теорема Пуансо): Всякую пространственную систему сил в общем случае можно заменить эквивалентной системой, состоящей из одной силы, приложенной в какой-либо точке тела (центре приведения) и равной главному вектору данной системы сил, и одной пары сил, момент которой равен главному моменту всех сил относительно выбранного центра приведения.
Пусть О — центр приведения, принимаемый за начало координат, r1,r2, r3,…, rn–соответствующие радиусы-векторы точек приложения сил F1, F2, F3, ...,Fn, составляющих данную систему сил (рис. 4.2, а). Перенесем силы F1, Fa, F3, ..., Fn в точку О. Сложим эти силы как сходящиеся; получим одну силу: Fо=F1+F2+…+Fn=åFk, которая равна главному вектору (рис. 4.2, б). При последовательном переносе сил F1, F2,..., Fn в точку О получаем каждый раз соответствующую пару сил (F1, F”1), (F2,F”2),...,(Fn, F"n).Моменты этих пар соответственно равны моментам данных сил относительно точки О: М1=М(F1,F”1)=r1 x F1=Мо(F1), М2=М(F2, F”2)=r2 x F2=Мо(F2), …, Мп=М(Fn, F"n)=rn x Fn=Мо(Fn). На основании правила приведения системы пар к простейшему виду все указанные пары можно заменить одной парой. Ее момент равен сумме моментов всех сил системы относительно точки О, т. е. равен главному моменту, М0=М1+М2+...+Мn=Мо(F1)+Мо(F2)+…+ Мо(Fn)==åМо(Fk)=årk x Fk. Систему сил, как угодно расположенных в пространстве, можно в произвольно выбранном центре приведения заменить силой Fo=åFk и парой сил с моментом M0=åM0(Fk)=årk x Fk.
24. Формулы для определения главного вектора и главного момента в декартовой системе координат.
Выбираем систему координатных осей Oxyz и вычисляем проекции главного вектора как алгебраические суммы проекций всех заданных сил на выбранные оси:
![]()
П![]()
![]() о
найденным проекциям, откладывая
соответствующие отрезки вдоль координатных
осей (с учетом знака проекции), строим
прямоугольный параллелепипед. Направленная
диагональ, проведенная из начала
координат в противоположную вершину
параллелепипеда, определяет главный
вектор R . Модуль и направляющие косинусы
главного вектора определяются следующими
вытекающими из построения формулами:
о
найденным проекциям, откладывая
соответствующие отрезки вдоль координатных
осей (с учетом знака проекции), строим
прямоугольный параллелепипед. Направленная
диагональ, проведенная из начала
координат в противоположную вершину
параллелепипеда, определяет главный
вектор R . Модуль и направляющие косинусы
главного вектора определяются следующими
вытекающими из построения формулами:
![]() Совершенно аналогично определяются
проекции, модуль и направляющие косинусы
главного момента:
Совершенно аналогично определяются
проекции, модуль и направляющие косинусы
главного момента:
![]()
Главный
момент, по определению, есть векторная
сумма моментов всех сил центра О.
Следовательно, его проекции на координатные
оси равны алгебраическим суммам проекций
на эти оси векторов-моментов сил
относительно центра О, то есть величин
![]() Но эти величины, по определению момента
силы относительно оси, являются моментами
сил относительно соответствующих
координатных осей:
Но эти величины, по определению момента
силы относительно оси, являются моментами
сил относительно соответствующих
координатных осей:
![]()
Косинус
угла между главным вектором и главным
моментом определяется так:
![]()
![]() Отсюда:
Отсюда:![]()
25. Зависимость
главного момента от выбора центра
приведения.При
переходе от одного центра приведения
к другому изменяется момент произвольной
силы Fi
,
выражения для моментов силы относительно
каждого из центров:
![]()
![]()
1.
Между собой точки приведения A
и B
связаны радиус-вектором d:![]()
2.
Радиус-вектор rBi
в выражение для момента силы MB(Fi):![]()
3.
Просуммируем моменты всех сил MB(Fi):![]()
4.
Получили зависимость главного момента
сил от выбора центра приведения:![]()
главный
минимальный момент
выражается
через скалярное
произведение:![]()
Главный
минимальный момент
может
быть вычислен как проекция
главного момента
в любой точке приведения на центральную
ось:![]()