

7.Приведение системы сходящихся сил к равнодействующей.
С![]()
![]()
![]() истема
сходящихся сил эквивалентна одной силе
(равнодействующей), которая равна
сумме всех этих сил и проходит через
точку пересечения их линий действия.
Пусть задана система сходящихся сил
F1,
F2,
F3,
..., Fn,
приложенных к абсолютно твердому
телу . Перенесем точки приложения сил
по линиям их действия в точку пересечения
этих линий . Получили систему сил,
приложенной к одной точке. Она
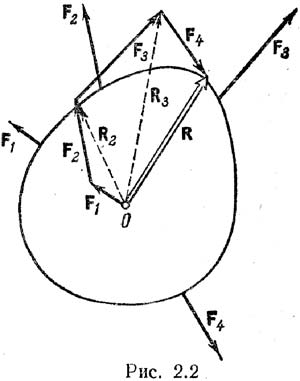
эквивалентна заданной. Сложим F1
и F2,
получим их равнодействующую: R2=F1+F2.
Сложим R2
с F3:
R3=R2+F3=F1+F2+F3.
Сложим F1+F2+F3+…+Fn=Rn=R=åFi.
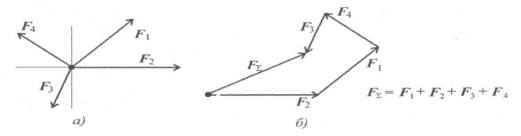
Вместо параллелограммов можно построить
силовой многоугольник. Пусть система
состоит из 4 сил . От конца вектора F1
отложим вектор F2.
Вектор, соединяющий начало О и конец
вектора F2,
будет вектором R2.
Далее отложим вектор F3,
помещая
его начало в конце вектора F2.
Тогда мы получим вектор R8,
идущий от точки О к концу вектора F3.
Точно так же добавим вектор F4;
при этом получим, что вектор, идущий от
начала первого вектора F1
к концу вектора F4,
является равнодействующей R. Такой
пространственный многоугольник
называется силовым. Если конец последней
силы не совпадает с началом первой
силы, то силовой многоугольник -
разомкнутый.
истема
сходящихся сил эквивалентна одной силе
(равнодействующей), которая равна
сумме всех этих сил и проходит через
точку пересечения их линий действия.
Пусть задана система сходящихся сил
F1,
F2,
F3,
..., Fn,
приложенных к абсолютно твердому
телу . Перенесем точки приложения сил
по линиям их действия в точку пересечения
этих линий . Получили систему сил,
приложенной к одной точке. Она
эквивалентна заданной. Сложим F1
и F2,
получим их равнодействующую: R2=F1+F2.
Сложим R2
с F3:
R3=R2+F3=F1+F2+F3.
Сложим F1+F2+F3+…+Fn=Rn=R=åFi.
Вместо параллелограммов можно построить
силовой многоугольник. Пусть система
состоит из 4 сил . От конца вектора F1
отложим вектор F2.
Вектор, соединяющий начало О и конец
вектора F2,
будет вектором R2.
Далее отложим вектор F3,
помещая
его начало в конце вектора F2.
Тогда мы получим вектор R8,
идущий от точки О к концу вектора F3.
Точно так же добавим вектор F4;
при этом получим, что вектор, идущий от
начала первого вектора F1
к концу вектора F4,
является равнодействующей R. Такой
пространственный многоугольник
называется силовым. Если конец последней
силы не совпадает с началом первой
силы, то силовой многоугольник -
разомкнутый.
Графический и аналитический способы нахождения равнодействующей.
При графическом способе определения равнодействующей векторы сил можно вычерчивать в любом порядке, результат (величина и направление равнодействующей) при этом не изменится.
Вектор равнодействующей направлен навстречу векторам сил-слагаемых. Такой способ получения равнодействующей называют геометрическим. При вычерчивании многоугольника необходимо обращать внимание на параллельность сторон многоугольника соответствующим векторам сил.
А
![]()
 налитическое
определение равнодействующей – каждая
из сил, геометрическая сумма которых
дает
равнодействующую,
может быть
представлена
через
ее проекции на координатные оси и
единичные векторы (орты):
Тогда
равнодействующая выражается через
проекции сил в виде:
налитическое
определение равнодействующей – каждая
из сил, геометрическая сумма которых
дает
равнодействующую,
может быть
представлена
через
ее проекции на координатные оси и
единичные векторы (орты):
Тогда
равнодействующая выражается через
проекции сил в виде:![]() Группировка
по ортам дает выражения для проекций
равнодействующей:
Группировка
по ортам дает выражения для проекций
равнодействующей:![]() Отсюда
проекции равнодействующей:
Отсюда
проекции равнодействующей:
Направляющие косинусы равнодействующей :
Модуль равнодействующей:
9.Алгебраический способ нахождения равнодействующей.
Аналитическое определение равнодействующей – каждая из сил, геометрическая сумма которых дает равнодействующую, может быть представлена через ее проекции на координатные оси и единичные векторы (орты):
Тогда равнодействующая выражается через проекции сил в виде: Группировка по ортам дает выражения для проекций равнодействующей: Отсюда проекции равнодействующей:
Направляющие косинусы равнодействующей :
М одуль равнодействующей:
10.Геометрическое и аналитическое условие равновесия системы сходящихся сил.
Для равновесия приложенной к твердому телу системы сходящихся сил необходимо и достаточно, чтобы равнодействующая этих сил была равна нулю. Условия, которым при этом должны удовлетворять сами силы, можно выразить в геометрической или аналитической форме.
1.Геометрическое условие равновесия. Для равновесия системы, сходящихся сил необходимо и достаточно, чтобы силовой многоугольник, построенный из этих сил, был замкнут. Условия равновесия плоской системы сходящихся сил в аналитической форме: Исходя из того, что равнодействующая равна нулю, получим:
![]()
F![]() Σ
= 0. Условия равновесия в аналитической
форме : плоская
система сходящихся сил находится в
равновесии, если
алгебраическая сумма проекций всех сил
системы на любую ось равна нулю.
Система
уравнений равновесия плоской сходящейся
системы сил:
Σ
= 0. Условия равновесия в аналитической
форме : плоская
система сходящихся сил находится в
равновесии, если
алгебраическая сумма проекций всех сил
системы на любую ось равна нулю.
Система
уравнений равновесия плоской сходящейся
системы сил: