

1. Основные понятия статики.
Статика - раздел механики о силах и условиях равновесия материальных тел, находящихся под действием сил. Равновесие - состояния покоя тела по отношению к другим материальным телам.
Основные понятия:
В![]() еличина,
являющаяся количественной мерой
механического взаимодействия материальных
тел, называется силой. Сила является
величиной векторной. Ее действие на
тело определяется: 1) численной величиной
или модулем силы, 2) направлением силы,
3) точкой приложения силы, (рис. 1).
еличина,
являющаяся количественной мерой
механического взаимодействия материальных
тел, называется силой. Сила является
величиной векторной. Ее действие на
тело определяется: 1) численной величиной
или модулем силы, 2) направлением силы,
3) точкой приложения силы, (рис. 1).
Совокупность сил, действующих на какое-нибудь твердое тело, называется системой сил. Тело, не скрепленное с другими телами, которому из данного положения можно сообщить любое перемещение в пространстве, называется свободным. Если одну систему сил, действующих на свободное твердое тело, можно заменить другой системой, не изменяя при этом состояния покоя или движения, в котором находится тело, то такие две системы сил называются эквивалентными. Система сил, под действием которой свободное твердое тело может находиться в покое, называется уравновешенной или эквивалентной нулю. Если данная система сил эквивалентна одной силе, то эта сила называется равнодействующей данной системы сил. Внешними называются силы, действующие на частицы данного тела со стороны других материальных тел. Внутренними называются силы, с которыми частицы данного тела действуют друг на друга. Сила, приложенная к телу в какой-нибудь одной его точке, называется сосредоточенной. Силы, действующие на все точки данного объема или данной части поверхности тела, называются распределенными.
2. Аксиомы статики.
Аксиома инерции – Под действием взаимно уравновешенной системы сил тело находится в состоянии покоя или равномерного прямолинейного движения.
Аксиома двух сил – Если тело под действием двух сил находится в равновесии, то эти силы равны по модулю и направлены по одной прямой в противоположные стороны. Такие две силы представляют собой простейшую взаимно уравновешенную систему сил.
![]()
3. Аксиома присоединения – Если к заданной системе сил присоединить (или изъять) взаимно уравновешенную систему сил, то кинематическое состояние тела не изменится.
![]()
 Следствие
из аксиомы присоединения Кинематическое
состояние тела не изменится, если силу
перенести по линии ее действия
Следствие
из аксиомы присоединения Кинематическое
состояние тела не изменится, если силу
перенести по линии ее действия
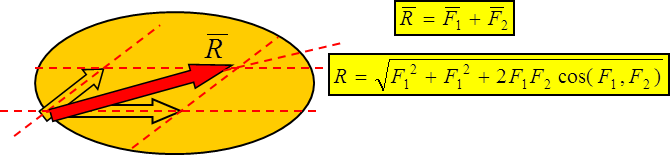
4. Аксиома параллелограмма – Равнодействующая двух пересекающихся сил равна диагонали параллелограмма, построенного на этих силах как на сторонах
5. Аксиома действия и противодействия – Всякому действию соответствует равное и противоположное противодействие (III закон Ньютона).
![]()
6. Аксиома отвердевания– Равновесие деформируемого тела сохраняется при его затвердевании (обратное справедливо не всегда).
3. Активные силы и реакции связей.
В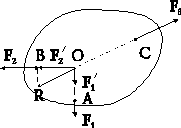 се
тела делятся на свободные и
связанные.
Свободные тела — тела,
перемещение которых не ограничено.
Связанные тела — тела, перемещение
которых ограничено другими телами.
Тела,
ограничивающие перемещение
других тел, называют связями. Силы,
действующие от связей и препятствующие
перемещению, называют реакциями
связей.
Реакция связи всегда направлена с той
стороны, куда
нельзя перемещаться.
Всякое связанное тело можно представить
свободным, если связи заменить их
реакциями (принцип освобождения от
связей).
Все
связи можно разделить на несколько
типов.
Связь
— гладкая опора
(без трения)
се
тела делятся на свободные и
связанные.
Свободные тела — тела,
перемещение которых не ограничено.
Связанные тела — тела, перемещение
которых ограничено другими телами.
Тела,
ограничивающие перемещение
других тел, называют связями. Силы,
действующие от связей и препятствующие
перемещению, называют реакциями
связей.
Реакция связи всегда направлена с той
стороны, куда
нельзя перемещаться.
Всякое связанное тело можно представить
свободным, если связи заменить их
реакциями (принцип освобождения от
связей).
Все
связи можно разделить на несколько
типов.
Связь
— гладкая опора
(без трения)
![]()
Реакция опоры приложена в точке опоры и всегда направлена перпендикулярно опоре (рис. 1.7). Гибкая связь (нить, веревка, трос, цепь) . Груз подвешен на двух нитях (рис. 1.8). Реакция нити направлена вдоль нити от ела, при этом нить может быть только растянута.
Ж есткий
стержень
Стержень
может быть сжат или растянут. Реакция
стержня направлена вдоль стержня.
Стержень работает на растяжение или
сжатие.
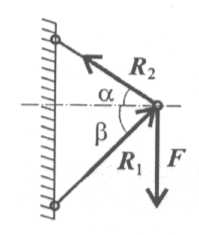
Возможным
перемещением
точки называется такое бесконечно малое
мысленное перемещение, которое
допускается в данный момент наложенными
на него связями. Убираем стержень 1, в
этом случае стержень 2 падает вниз.
Следовательно, сила от стержня 1
(реакция) направлена вверх. Убираем
стержень 2. В этом случае точка Л опускается
вниз, отодвигаясь от стены. Следовательно,
реакция стержня 2 направлена к стене.
есткий
стержень
Стержень
может быть сжат или растянут. Реакция
стержня направлена вдоль стержня.
Стержень работает на растяжение или
сжатие.
Возможным
перемещением
точки называется такое бесконечно малое
мысленное перемещение, которое
допускается в данный момент наложенными
на него связями. Убираем стержень 1, в
этом случае стержень 2 падает вниз.
Следовательно, сила от стержня 1
(реакция) направлена вверх. Убираем
стержень 2. В этом случае точка Л опускается
вниз, отодвигаясь от стены. Следовательно,
реакция стержня 2 направлена к стене.
Ш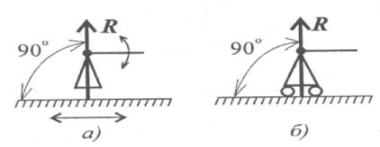 арнирная
опора
Шарнир
допускает поворот вокруг точки
закрепления. Различают два вида
шарниров.
Подвижный
шарнир
Стержень,
закрепленный на шарнире, может
поворачиваться вокруг шарнира, а
точка крепления может перемещаться
вдоль направляющей .
Реакция подвижного
шарнира направлена перпендикулярно
опорной поверхности, т. к. не допускается
только перемещение поперек опорной
поверхности.
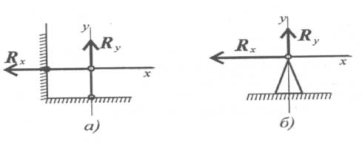
Неподвижный
шарнир
Точка
крепления перемещаться не может.
Стержень может свободно поворачиваться
вокруг оси шарнира. Реакция такой
опоры проходит через ось шарнира, но
неизвестна по направлению. Ее принято
изображать в виде двух составляющих:
горизонтальной и вертикальной .
арнирная
опора
Шарнир
допускает поворот вокруг точки
закрепления. Различают два вида
шарниров.
Подвижный
шарнир
Стержень,
закрепленный на шарнире, может
поворачиваться вокруг шарнира, а
точка крепления может перемещаться
вдоль направляющей .
Реакция подвижного
шарнира направлена перпендикулярно
опорной поверхности, т. к. не допускается
только перемещение поперек опорной
поверхности.
Неподвижный
шарнир
Точка
крепления перемещаться не может.
Стержень может свободно поворачиваться
вокруг оси шарнира. Реакция такой
опоры проходит через ось шарнира, но
неизвестна по направлению. Ее принято
изображать в виде двух составляющих:
горизонтальной и вертикальной .
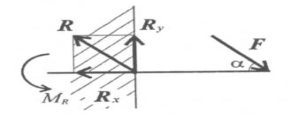
Защемление
Любые перемещения точки крепления невозможны. Реактивную силу принято представлять в виде двух составляющих вдоль осей координат. R = Rx + Ry.