

17.9. Автокубатурники, определяющие объем пачки сортиментов
Если сортименты формируют в пачки для штабелевки, погрузки или сплава, наиболее эффективно определять объем не отдельных бревен, а сразу всей пачки. Геометрический обмер пачки производится в момент, когда она сжата специаль-
ными стойками (рис. 17.8,а). Фиксация размеров осуществляется различными воспринимающими элементами линейных и угловых перемещений. При известной длине сортимента и коэффициента полнодревесности объем пачки состоит
Q = ablk,
где а — ширина пачки; b — высота пачки; l — длина пачки (сортимента), м; k—коэффициент полнодревесности.
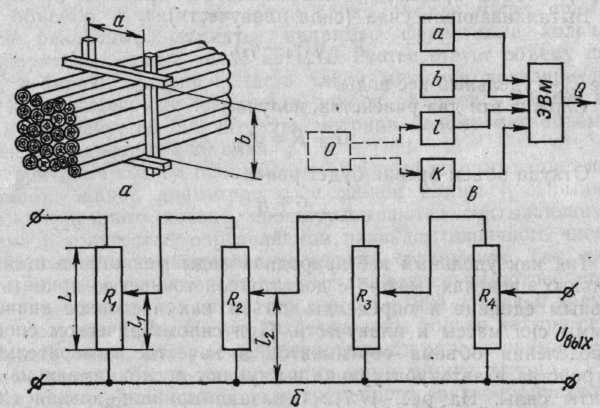
Рис. 17.8. Схема измерения объема пачки сортиментов
Наиболее наглядно произведение можно вычислить схемой аналогового (непрерывного) устройства на сопротивлениях R1, R2, R3, R4, показанной на рис. 17.8,б.
Ползунки потенциометров R1, R2 кинематически связаны со стойками, которые фиксируют геометрический размер пачки а и b, а потенциометры R3 и R4 оператор устанавливает на определенную длину. Коэффициент полнодревесности — величина постоянная при обмере одной пачки.
Выходное напряжение такого множительного устройства определяется следующим уравнением:
Uвых=U0x1x2x3x4
где U0 — напряжение питания; xi = li/L относительные пере-
мещения ползунков потенциометра, здесь U — перемещение ползунка, см; L — длина потенциометра, см.
Такая каскадная схема моделирует логическую операцию умножения нескольких величин.
Значение выходного напряжения Uвых можно получить через аналогово-кодовое преобразующее устройство на одно из автоматических печатающих устройств, соответствующих данному коду.
Блок-схема такого автокубатурника приведена на рис. 17.8, в. Она состоит из воспринимающих элементов ширины пачки а, ее высоты b, длины l и коэффициента полнодревесности k. Сигналы от датчиков поступают в множительное устройство, на выходе которого фиксируется результат обмера Q (м3).
Применение таких автокубатурников целесообразно, если сформированная пачка бревен в дальнейшем не рассыпается и доходит в таком состоянии до потребителя.
Контрольные вопросы
1. Объясните принцип работы измерительных устройств автокубатур-ников.
2. Как производится автоматическая маркировка круглых лесоматериалов?
3. Какие способы учета объемов круглых лесоматериалов вы знаете?
список рекомендуемой литературы
1. Материалы XXVII съезда КПСС—М.: Политиздат, 1986.—352 с.
2. Автоматические манипуляторы и робототехнические системы/Под редакцией Е. П. Попова.— М.: Машиностроение, 1986.— 142 с.
3. Вильке Г. А. Автоматизация производственных процессов лесопромышленных предприятий.— М.: Лесная промышленность, 1972.— 413 с.
4. Диордиев А. Л., Иотковский Б. Г., Подвальный С. Л. Микропроцессоры и микроЭВМ в АСУТП — Воронеж: Изд. ВПИ.— 1984.— 47 с.
5. Жаботинский Ю. Д., Исаев Ю. В. Адаптивные промышленные роботы и их применение.—М.: Радио и связь, 1985.— 105 с.
6. Каган Б. М. Электронные вычислительные машины и системы.—М.: Энергоатомиздат, 1985.— 552 с.
7. Коновалов Л. И., Петелин Д. П. Элементы и системы автоматики.— М.: Высшая школа, 1985.— 216 с.
8. Марголин Η. Μ., Гуров А. С. Функциональные узлы схем автоматического управления.— М.: Энергоиздат, 1983.— 168 с.
9. Микропроцессоры. Архитектура микроЭВМ. Организация вычислительных процессов. Средства сопряжения/Под ред. Л. Н. Преснухина.— М.: Высшая школа, 1986.— 494 с.
10. Петровский В. С. Автоматическая оптимизация раскроя древесных стволов.— М.: Лесная промышленность, 1970.— 183 с.
11. Петровский В. С, Харитонов В. В. Автоматика и автоматизация производственных процессов лесопромышленных предприятий.— М.: Лесная промышленность, 1984.— 240 с.
12. Харитонов В. В. Основы автоматизации лесозаготовительного производства.— М.: Лесная промышленность, 1987.— 272 с.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
A
Автокубатурник импульсный 458
— интегрирующий 456
— силометрический 461
— табличный 460 Автомат 7 Автоматизация комплексная 9
— полная 9
— частичная 9 Алгоритм 9
Аппараты громкоговорящей связи
438
АСУТП 10
В
Выключатель конечный бесконтактный 27
Д
Датчик дефектоскопии древесины 48
— емкостный 40
— гравитационный 314
— давления 56
— импульсный 43
— индуктивный 25
— контактного сопротивления 53
— магнитоупругий 55
— потенциометрический 27
— проволочные 53
— пьезометрический 55
— размеров 23
— реостатные 26
— скорости 50
— телевизионного измерения 32
— температуры 57
— углов поворота 40 Двигатели двухфазные 96
— однооборотные 97
— постоянного тока 101
— шаговые 103 Делитель потоков 323 Дешифратор 161 Диски магнитные 140
Ε
Емкость лесонакопителя 342 3
Законы функционирования комбинационных схем 146 Защита автоматическая 8 Звенья апериодические второго порядка 21
— идеальные интегрирующие 21
— инерционные интегрирующие 22
— колебательные 21
— реальные дифференцирующие 22
И
Интерфейс микропроцессорных систем 192, 195
Измеритель диаметров телевизионный 447
К
Кран-манипулятор с следящей системой 338 Кризистор 60 Критерий устойчивости 226
Л
Ленты магнитные 139, 140 Логика математическая 239
Μ
Матрица робота логическая 290, 291 МикроЭВМ С5-01 204
— СМ-1800 205
— Электроника НЦ 183, 204
— Электроника-60 183, 200
Модель хлыстов экономико-математические 397
— математическая 256, 258 Мультиплексор 171 Муфты 104
Η
Надежность работы технологического потока 345
О
Оптрон 72 Отсекатели 349
Π
Переключатель тиристорный 133
— транзисторный 132 Преобразователи аналого-цифровые 178
Применение языков для программирования 207 Позистор 60
Ρ
Раскряжевка хлыстов оптимальная 356 1
Расстановка пил при помощи вычислительных устройств 394 Регисторы 160
Регулирование скорости протаскивания деревьев 354 Регуляторы пропорциональные 219
— пропорционально-интегральные 220
— пропорционально - интегрально-дифференциальные 221
Реле времени 125
— герконовое 85
— гидравлическое 136
— нейтральное 79
— переменного тока 84
— пневматическое 136
— поляризованное 84
— электронное 137
Робот промышленный 280, 288, 293
С
Светодиод 31 Сельсин 35
Связки логические 239 Система измерения диаметров сканирующая 449
— двоичная 142
—-следящие на сортировке 415, 419
— счетные на сортировке на базе ЭВМ 422
Сортировочное устройство ЛВ-187 423
Структура микропроцессора 184 Сумматоры с параллельным переносом 168
— с последовательным переносом 168 Схемы управления электродвигателями 108, 109, ПО, 113
Счетчики 164
Τ
Таблица состояний 240, 256 Тахогенератор индукционный 51
— постоянного тока 50
— переменного тока 51 —фотоэлектрический 51 Термистор 59 Термопара 57 Терморезистор 59 Трансформатор вращающийся 39 Триггеры 132, 153, 154, 156, 158
У
Управление автоматическое 8, 9
— дистанционное 8 Усилители гидравлический 85
— золотниковый 85
— игольчатый 92
— «Логика-И» 74
— магнитный 75
— пневматический 85
— полупроводниковый 68
— сопло-заслонка 92
— тиристорный 73' — электронный 66 Установка раскряжевочная 358
— промышленная телевизионная 438
Φ
Фотодиод 31 Фоторезистор 31 Фототиристор 32 Фототранзистор 32 Фотоумножитель 30 Фотоэлемент 29 Функция передаточная 19
ш
Шифраторы 163
Ц
Циклограмма 258, 329, 351, 363
Э
Элементы аналоговые 11
— включающие 236
— выключающие 236
— воспринимающие 12
— исполнительные 12 —логические 12
— памяти 171
— релейные 12
— регулирующие 12
— усилительные 12
— цифровые 11
ОГЛАВЛЕНИЕ
Предисловие ....................... 3
Методические рекомендации.................4
Введение.......................... 6