

1.5. Простейшие типы связей
1. Идеально гладкая поверхность. Рассмотрим тело, которое может перемещаться без трения по гладкой горизонтальной поверхности (Рис.1.5а). Пусть в качестве активной силы выступает сила веса Р, приложенная в его центре тяжести. Реакция связи N представлена силой, распределенной по плоскости нижней грани этого тела, и ее можно считать приложенной в центре этой грани.

Принципиально картина не меняется, если поверхность тела или связи будет гладкой, но криволинейной (Рис.1.5б).
Пусть тело в виде бруса с гладкой поверхностью опирается в точке А на идеально гладкую поверхность, а в точке В на уступ (Рис.1.5в).
Нетрудно догадаться, что тело не сможет находиться в равновесии, если в качестве активной силы выступает его собственный вес, однако равновесие возможно, если к этому брусу приложить некоторую другую внешнюю силу F. При этом, как будет показано в следующей главе, равновесие возможно только в том случае, если линия действия этой силы проходит через точку пересечения линий действия реакций RA и RB .
Итак, по поводу этого типа связи можно сделать следующий вывод: реакция идеально гладкой поверхности приложена в точке касания и направлена по нормали к поверхности тела или связи.
2. Гибкая невесомая и нерастяжимая нить. Рассмотрим тело, которое подвешено на двух таких нитях и находится в равновесии под действием собственного веса и реакций нитей, прикрепленных к телу в точках А и В (Рис.1.6).
Реакция связи равна силе натяжения нити, она направлена вдоль нити и от тела, которое эта нить удерживает.
3. Жесткий невесомый прямолинейный стержень. Реакция направлена вдоль стержня, который, в отличие от нити, может воспринимать как растягивающие (SB), так и сжимающие (SA) усилия (Рис.1.7).
4. Подвижная опора. Допускает перемещение закрепленным таким образом точки тела только вдоль опорной плоскости (Рис.1.8а).
Реакция направлена перпендикулярно заштрихованной опорной площадке.
В учебной литературе этот вид связи также называют подвижным цилиндрическим шарниром.

Помимо стандартного обозначения, предусмотренного ГОСТом, на схемах эту связь изображают так, как показано на рис. 1.8б.

Отметим, что четыре рассмотренные связи имеют одну общую особенность: соответствующие им реакции известны по направлению и неизвестны по величине. То есть с точки зрения алгебры каждая из этих реакций соответствует только одному неизвестному.
5. Неподвижная опора. Препятствует перемещению закрепленной таким образом точки тела в горизонтальном и вертикальном направлениях. Это означает, что в общем случае реакция RA такой связи неизвестна по величине и по направлению. В качестве неизвестных при ее определении можно выбрать модуль реакции RAи угол , который она образует с осью Ox , либо проекции вектора RA на оси координат: RAX , RAY (Рис.1.9а).
Эта связь допускает поворот тела вокруг рассматриваемой точки, поэтому в учебной литературе эту связь также называют неподвижным цилиндрическим шарниром.
Помимо стандартного обозначения, предусмотренного ГОСТом, на схемах она изображается так, как показано на рис. 1.9б.

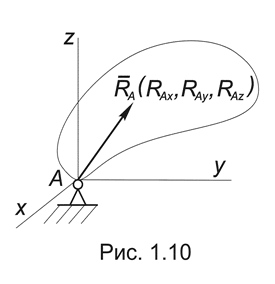
6. Сферический шарнир. В отличие от цилиндрического шарнира не допускает перемещения закрепленной таким образом точки тела в трех взаимно перпендикулярных направлениях. В качестве неизвестных при ее определении выбирают проекции этой реакции на оси координат: RAX , RAY , RAZ (Рис.1.10).
Рассмотренными в этом параграфе шестью типами связей мы и ограничимся. Другие связи будут рассмотрены по мере необходимости.
ПРИМЕЧАНИЯ:
1. В соответствии с аксиомой 7 на схемах нужно изображать одно из двух: либо связи, либо реакции отброшенных связей. На практике реакции связей нередко изображают одновременно со связями.
2. Связи, как и другие понятия, встречающиеся в аксиомах, являются абстракциями, весьма условно отражающими свойства реальных объектов. Например, рассмотренная выше гибкая невесомая нить может быть моделью подвесных и вантовых систем, у которых масса погонного метра троса составляет десятки и сотни килограммов. Однако усилия, возникающие в таких тросах, во столько раз больше их собственного веса, что при расчете последним можно пренебречь, считая их невесомыми.