

Раздел 1.
1.1 Классификация роботов.
1) По характеру выполняемых операций
Технологические (производственные) роботы
Вспомогательные (подъемно-транспортные) роботы
Универсальные роботы
2) По степени специализации
Специальные роботы
Специализированные роботы
Многоцелевые роботы
3) По числу степеней подвижности
Две
Три
Четыре
Пять
Шесть
Семь
4) По грузоподъемности
Сверлегкие (до 1 кг.)
Легкие (до 10 кг.)
Средние (до 200 кг.)
Тяжелые (до 1000 кг.)
Сверхтяжелые (более 1000 кг.)
5) По схеме расположения приводов
В едином блоке
На исполнительных органах
Комбинированное
6) По характеру программируемых скоростей и дискретности перемещений
Позиционные
- Цикловые
- Позиционные
Контурные
Комбинированные
1.2.Организация рабочей среды. Взаимодействие промышленного робота с рабочей средой.
В зависимости от степени организации рабочей (производственной;) среды выделяют робототехнические системы, обслуживающие: совершенно неорганизованную рабочую среду (рис. 3.1, а), полностью организованную (рис. 3.1, в) и частично организованную среду (рис. 3.1, б).
Рис. 3.1 в , иллюстрирует полную организацию деталей на плоскости, так как положение каждой из них совершенно определенное. Если же расстояния между деталями разные и случайные, то даже при условии их расположения по рядам имеем случай частично организованной среды. В приведенном на рис. 3.1 6 , примере частичная организация деталей типа валика заключается в том, что все они распределены на горизонтальной плоскости в один слой, но положение каждой из них совершенно случайное.
Выделяют два способа организации среды. Первый из них состоит в том, что детали упорядоченно и одновременно размещены на некотором участке площади или пространства, второй —все детали размещаются поочередно (последовательно) в одном месте.
С точки зрения простоты конструкции робота и программы его работы наиболее целесообразно заранее подготавливать (полностью или частично) обслуживаемые им объекты — обслуживаемую среду.
Робот может взаимодействовать также с не полностью организованной (упорядоченной) средой. В этом случае он захватывает не полностью сориентированные детали, окончательно ориентируя их непосредственно в самом ЗУ. Однако для успешного взаимодействия с неорганизованной или частично организованной средой ПР должен оснащаться разветвленной сетью сенсорных и тактильных устройств, обеспечивающих его информацией о принадлежности захватываемых объектов к определенному классу, занимаемом ими в пространстве и отдельно друг к другу положении, качестве изготовления и т. д. Кроме того для обработки этой информации и выработки решения об управляющих воздействиях на манипуляционную систему ПР требуется более совершенная система управления вплоть до использования ЭВМ что значительно удорожает разработку и изготовление робота и увеличивает затраты на обслуживание РТС в производственных условиях. Для снижения информационной и вычислительной нагрузки на ПР необходима предварительная организация рабочей среды.
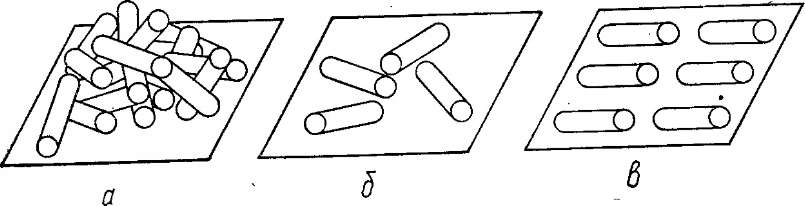
б – частично организованную, в – полностью организованную