

Контрольные вопросы
Какие источники теплоты существуют в электрических аппаратах?
Какие способы распространения теплоты есть в электрических аппаратах?
Напишите уравнения кривых нагрева и остывания.
Дайте основное определение постоянной времени нагрева.
Что такое адиабатный процесс нагрева?
В течение какого времени в долях от постоянной времени нагрева процесс нагрева можно считать адиабатным?
Какое из двух геометрически подобных тел, большое или маленькое, быстрее достигнет установившейся температуры?
Дайте определение установившегося превышения температуры тела.
Дайте определение повторно-кратковременного режима работы.
Почему при повторно-кратковременном режиме работы мощность источников теплоты может быть больше, чем при продолжительном режиме при одних и тех же значениях допустимой температуры?
Дайте определение коэффициентов перегрузки по мощности и по току.
Дайте определение относительной продолжительности включения.
Дайте определение кратковременного режима работы электрического аппарата.
Дайте определение режима короткого замыкания.
Что такое квадратичный импульс плотности тока?
Что представляют собой зависимости адиабатного нагрева?
Что такое фиктивное время короткого замыкания?
Укажите примерные значения допустимых температур при кратковременных режимах работы.
Дайте определение тока термической стойкости электрического аппарата.
Как пользоваться кривыми адиабатного нагрева тогда, когда начальная температура аппарата отлична от нулевого значения?
Контактная система электрических аппаратов
Под контактом в электрических аппаратах понимают явление или объект.
Как явление, электрический контакт – это соприкосновение тел, обеспечивающее прохождение тока в электрической цепи.
С другой стороны, соприкасающиеся тела называются контактами или контакт-деталями.
Классификация электрических контактов
По виду соединения электрические контакты разделяют на взаимоподвижные и взаимонеподвижные.
Взаимонеподвижные бывают разъемные (например, болтовое соединение) и неразъемные (сварные, паяные, напыленные).
Взаимоподвижные контакты бывают размыкающиеся и неразмыкающиеся.
Неразмыкающиеся контакты предназначены для передачи электрической энергии с неподвижных частей установки на подвижную и наоборот. К ним относятся щеточные скользящие (рис. 21), жидкометаллические, роликовые.
Размыкающиеся контакты – это расходящиеся в процессе работы, к ним относятся мостиковые (рис. 22), розеточные, щеточные, пальцевые и ножевые, с плоскими пружинами (рис. 23).

Рис. 21 Рис. 22 Рис. 23
Контактная поверхность и контактное сопротивление
Рассмотрим механический контакт двух металлических твердых тел. При любой чистоте обработки металлических поверхностей соприкосновение тел происходит не на всей площади, а лишь в отдельных ее точках (рис. 24.).
 Для
обеспечения надежного прохождения
электрического тока контакты сжимают
с силой, которая называется силой
контактного нажатия. Эта сила может
создаваться при затяжке болтов, при
обжатии контактного наконечника на
конце провода или из-за деформации
пружин контактной системы. При этом
микровыступы, по которым произошел
первоначальный контакт, деформируются.
В соприкосновение приходят другие
выступы, которые также могут деформироваться.
На поверхности образуются площадки,
которые и воспринимают усилие контактного
нажатия. Давление в разных точках
поверхности контактных площадок в общем
случае не одинаково и может вызвать как
упругие, так и пластические деформации.
Для
обеспечения надежного прохождения
электрического тока контакты сжимают
с силой, которая называется силой
контактного нажатия. Эта сила может
создаваться при затяжке болтов, при
обжатии контактного наконечника на
конце провода или из-за деформации
пружин контактной системы. При этом
микровыступы, по которым произошел
первоначальный контакт, деформируются.
В соприкосновение приходят другие
выступы, которые также могут деформироваться.
На поверхности образуются площадки,
которые и воспринимают усилие контактного
нажатия. Давление в разных точках
поверхности контактных площадок в общем
случае не одинаково и может вызвать как
упругие, так и пластические деформации.
Таким образом, механический контакт двух тел происходит не по всей видимой поверхности, а лишь в точках; при сжатии их с силой – по отдельным площадкам (рис. 25).
Общая поверхность тел, с которой производится контакт, называется кажущейся контактной поверхностью.

На этой поверхности появляются площадки, полученные в результате деформации микровыступов, которые воспринимают усилие. Эта часть контактной поверхности называется поверхностью, воспринимающей усилие.
Очевидно, что электрический ток может проходить через точки поверхности, воспринимающие усилие, т.е. там, где есть механический контакт.
Однако, условия механического контакта являются необходимыми, но недостаточными.
При большем увеличении поверхности, воспринимающей усилие, можно обнаружить ее неоднородность: одна часть покрыта пленками оксидов, другая – хемосорбирующими слоями атомов кислорода и, наконец, третья часть – чисто металлическая поверхность.
При прохождении электрического тока поверхность, покрытая оксидными пленками, обладает большим электрическим сопротивлением, так как удельное сопротивление оксидов на несколько порядков выше удельного сопротивления чистых металлов. Например, для меди при 0ºС ρ0=1,62·10-8 Ом·м, а для оксида меди (СuО)
ρ0=1–10 Ом·м, для закиси меди (Сu2О) ρ0=106 –107Ом·м.
Через поверхность, покрытую хемосорбирующими слоями кислорода, электрический ток может проходить за счет туннельного эффекта. Этот участок поверхности имеет квазиметаллический характер проводимости.
И, наконец, третья часть поверхности проводит свободно электрический ток благодаря чисто металлической поверхности.
Квазиметаллические и металлические поверхности контакта называются α-пятнами (см. рис. 25). Это именно те части контактной поверхности, через которые проходит электрический ток.
Очевидно, что электрический ток, проходящий через контактную поверхность, испытывает сопротивление, называемое переходным сопротивлением контактов.
Переходное сопротивление контактов складывается из сопротивления оксидных пленок контактной поверхности и так называемого сопротивления стягивания.
Рассмотрим
это явление подробно при прохождении
электрического тока через электрический
контакт с одним α-пятном (рис. 26). Если
на некотором удалении от α-пятна линии
тока параллельны друг другу, то в
непосредственной б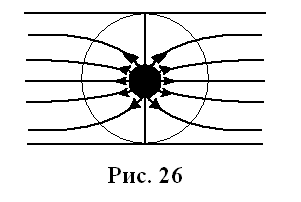 лизости
от него они искрив-ляются и «стягиваются»
к α-пятну. Область электрического
контакта, где линии тока искривляются,
стягиваясь к α-пятну, называется областью
стягивания.
лизости
от него они искрив-ляются и «стягиваются»
к α-пятну. Область электрического
контакта, где линии тока искривляются,
стягиваясь к α-пятну, называется областью
стягивания.
В областях стягивания поперечное сечение проводника используется не полностью для прохождения электрического тока, что вызывает дополнительное сопротивление.
В настоящее время для расчета эффекта стягивания контактов используется математическая модель Хольма, основанная на ряде допущений [1]. В основу модели положена аналогия токов в контакте и электрического поля заряженного диска.
Получена формула Хольма:
 , (28)
, (28)
где Rc – электрическое сопротивление стягивания контактов;
ρ – удельное сопротивление стягивания контактов;
а – радиус заряженного диска, равный радиусу круглой площадки контакта.
При упругих деформациях радиус круглой площадки определяется из выражения:
 , (29)
, (29)
где Р – усилие сжатия тел;
Е – модуль упругости материала контактов;
r – радиус кривизны сферической поверхности контакта детали;
m = 1,11 при соприкосновении шарообразной и плоской поверхностей;
m = 0,86 при соприкосновении двух шарообразных поверхностей.
Если деформации пластические, то
 ,
(30)
,
(30)
где σсм – напряжение смятия материала контактов.
Существует эмпирическая формула для определения сопротивления контактов:
 ,
,
где n=0,3–0,8; K0 – коэффициент, зависящий от материала, из которого изготовлены контакты.