1.5.1. Рассмотрим последовательность силового расчета для кривошипно-ползунного механизма.
К
звеньям 3 и 4 двухповодковой группы (см.
рис. ПI.г.),
выделенной в заданном рабочем положении
механизма, прикладываются по направлениям
их действия все силы и реакции отсоединенных
звеньев. В начале рассматривается
равновесие шатуна из условия:


В
результате решения этого уравнения
определяется
 – тангенциальная составляющая реакция
– тангенциальная составляющая реакция
 в паре “
”.
Составим уравнение сил, действующих на
звенья группы 3 – 4 из условия
в паре “
”.
Составим уравнение сил, действующих на
звенья группы 3 – 4 из условия

В
этом уравнении реакции
 и
и
 ,
известны по направлениям. Определим
графоаналитическим способом, то есть
построением плана сил все неизвестные
составляющие. План сил двухповодковой
группы (3 - 4) Ассура показан на рис. П1.
Д., выполненный в масштабе.
,
известны по направлениям. Определим
графоаналитическим способом, то есть
построением плана сил все неизвестные
составляющие. План сил двухповодковой
группы (3 - 4) Ассура показан на рис. П1.
Д., выполненный в масштабе.
Построение
плана сил начинаем с вектора
 тангенциальной составляющей реакции
в кинематической паре ”
”.
Приняв масштаб
тангенциальной составляющей реакции
в кинематической паре ”
”.
Приняв масштаб
 из точки 2 откладываем отрезок
из точки 2 откладываем отрезок
 в направлении перпендикулярном звену
в заданном положении. Длина отрезка (2
- 3) выбирается из расчета
в направлении перпендикулярном звену
в заданном положении. Длина отрезка (2
- 3) выбирается из расчета
 ,
мм. Значение силы |
,
мм. Значение силы | |
определим из уравнения моментов сил
(23). Далее из точки 3 откладываем в принятом
масштабе
|
определим из уравнения моментов сил
(23). Далее из точки 3 откладываем в принятом
масштабе
 отрезок (3 - 4), соответствующий величине
силы инерции
отрезок (3 - 4), соответствующий величине
силы инерции
 в принятом масштабе
.
Отрезок
в принятом масштабе
.
Отрезок
 ,
мм.
,
мм.
Исходя
из условия равновесия сил системы тел
 векторный многоугольник сил должен
быть замкнут. Для этого из точки 2 проведем
линию параллельно
векторный многоугольник сил должен
быть замкнут. Для этого из точки 2 проведем
линию параллельно
 до пересечения с линией, проведенной
из точки 5 перпендикулярно оси (x
- x)
– траектории движения ползуна. Точку
пересечения 1 соединяем с точкой 3 плана
сил и замыкаем векторный многоугольник.
Отрезок
до пересечения с линией, проведенной
из точки 5 перпендикулярно оси (x
- x)
– траектории движения ползуна. Точку
пересечения 1 соединяем с точкой 3 плана
сил и замыкаем векторный многоугольник.
Отрезок
 соответствующий полной реакции |
|
в отсоединенной кинематической паре
“
”
на шатуне. Отрезок
соответствующий полной реакции |
|
в отсоединенной кинематической паре
“
”
на шатуне. Отрезок
 соответствующей реакции |
|
в кинематической паре “
”
двухповодковой группы Ассура
(ползун-шатун). С целью упрощения
построения плана сил не учтены силы
тяжести звеньев шатуна
соответствующей реакции |
|
в кинематической паре “
”
двухповодковой группы Ассура
(ползун-шатун). С целью упрощения
построения плана сил не учтены силы
тяжести звеньев шатуна
 и ползуна
и ползуна
 .
Зная масштаб сил
,
измерив на плане сил (рис. П1. д.) отрезки
векторов сил |
|
и |
|,
получим значение этих сил по величине
или по модулю:
.
Зная масштаб сил
,
измерив на плане сил (рис. П1. д.) отрезки
векторов сил |
|
и |
|,
получим значение этих сил по величине
или по модулю:
 |
=
|
=

Аналогично определяем остальные составляющие силы. Так, полная реакция от силы давления в паре ” ” на кривошип | | определяется, как геометрическая сумма ее составляющих:

Из
плана сил имеем

Если
точка приложения реакции
не совпадает с парой “
”,
то есть когда центр масс ползуна находится
на каком-то расстоянии
 от точки “
”,
тогда составляют уравнение равновесия
звена 4 /ползуна/ из условия:
от точки “
”,
тогда составляют уравнение равновесия
звена 4 /ползуна/ из условия:

В
нашем примере все силы звена проходят
через точку “
”
и поэтому плечо реакции
 .
.
1.5.2. Силовой расчет входного звена.(кривошипа)
Входное или начальное звено-кривошип должно находиться в равновесии под воздействием силы давления в паре “ ”.
Для этого необходимо определить уравновешивающую силу или момент, а также реакции в паре кривошип-стойка. Под уравновешивающими силами или моментами подразумевают те внешние силы и моменты, которые обеспечивают заданное движение механизма. Если движение передается от привода через муфту, то можно записать условие равновесия кривошипа в виде:

Отсюда находим значение уравновешивающего момента:

Где - масштаб плана положения кривошипа (см. рис. П1.е).
Реакция
на стойке
 может быть определена из плана сил,
действующих на кривошип и стойку. Исходя
из условия равновесия
запишем:
может быть определена из плана сил,
действующих на кривошип и стойку. Исходя
из условия равновесия
запишем:
 .
Отсюда следует:
.
Отсюда следует:

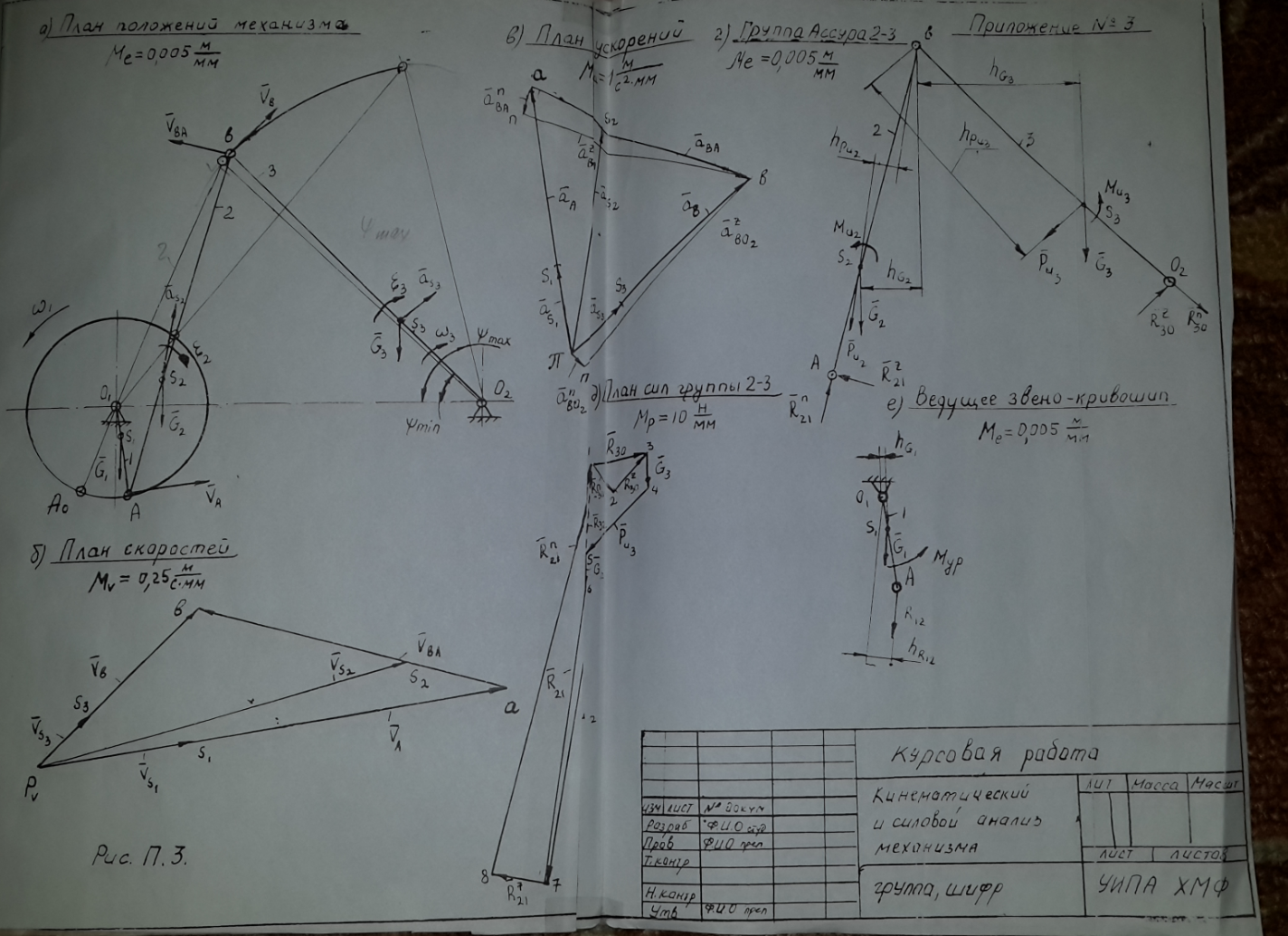
Силовой расчет кривошипно-коромыслового механизма производится графоаналитическим способом в такой же последовательности с учетом его особенностей в части выходного звена-коромысла. План сил для двухповодковой группы Ассура кривошипно-коромыслового механизма приводится на рис. ПЗ.д. (см. приложение №3). Условие равновесия кривошипа для этого механизма показано на плане положения входного—ведущего звена (см. рис. ПЗ. е.) .
В
приложении №3 приведены: план положений
кривошипно-коромыслового механизма
(рис. ПЗ. а.); план скоростей
 (рис.
ПЗ. б.); план ускорений (рис. ПЗ. в.);
двухповодковая группа Ассура (шатун 2-
коромысло 3, см. рис. ПЗ. г.); план сил
группы звеньев 2-3 (см.рис. ПЗ. д.); план
положения ведущего звена-кривошипа
(рис. ПЗ. е.). Все построения выполнены в
соответствующих масштабах.
(рис.
ПЗ. б.); план ускорений (рис. ПЗ. в.);
двухповодковая группа Ассура (шатун 2-
коромысло 3, см. рис. ПЗ. г.); план сил
группы звеньев 2-3 (см.рис. ПЗ. д.); план
положения ведущего звена-кривошипа
(рис. ПЗ. е.). Все построения выполнены в
соответствующих масштабах.
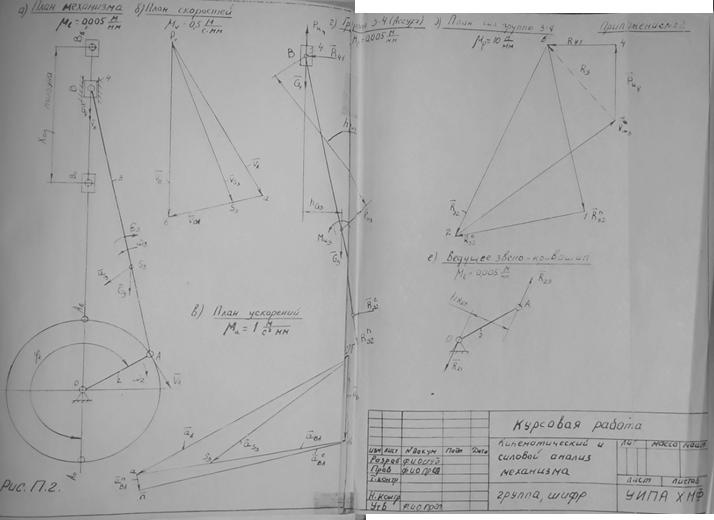
В
приложении №2 приведен в качестве
примера кинематический и силовой анализ
кривошипно-ползунного механизма с
вертикальным расположением оси
перемещения выходного звена-поршня. На
рис.П2.а. показан план положений механизма
на рабочем ходу и крайние положения
кривошипа
 определяющие ход ползуна-поршня при
его перемещении в направлении оси (x
- x).
На рис.П2.б. показан план скоростей в
заданном положении на рабочем ходу. На
рис. П2.в. показан план ускорений. На
рис. П2. г. показана двухповодковая
группа Ассура (звеньев 3-4; шатун
-ползун), выполненная в масштабе
плана
положений механизма. К ней приложены
действующие силы и реакции в отсоединенных
кинематических парах "А"
и "В".
На рис. ПЗ. д. приведен план cил
группы звеньев 3-4, выполненный в масштабе
. На рис. П2. е. показано ведущее
звено-кривошип с при ложенными к нему
силами и реакциями. Все построения
выполнены в соответствующих масштабах.
определяющие ход ползуна-поршня при
его перемещении в направлении оси (x
- x).
На рис.П2.б. показан план скоростей в
заданном положении на рабочем ходу. На
рис. П2.в. показан план ускорений. На
рис. П2. г. показана двухповодковая
группа Ассура (звеньев 3-4; шатун
-ползун), выполненная в масштабе
плана
положений механизма. К ней приложены
действующие силы и реакции в отсоединенных
кинематических парах "А"
и "В".
На рис. ПЗ. д. приведен план cил
группы звеньев 3-4, выполненный в масштабе
. На рис. П2. е. показано ведущее
звено-кривошип с при ложенными к нему
силами и реакциями. Все построения
выполнены в соответствующих масштабах.
СПИСОК РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ.
Артобалевский И.И. Теории механизмов и машин.- Наука, 1985 г. 636 с.
Кореняко A.C. и др. Теория механизмов и машин. - Киев:
Высшая школа, 1976 г. - 443 с.
Машнев М .Н. и др. Теория механизмов и машин и детали машин. -JI.: Машиностроение, I960. -511 с.