

Пояснювальна записка
Методична розробка складена відповідно вимог навчальної програми зо дисципліні “Теорія машин і механізмів” спеціальностей 5.07010301 “Технічне обслуновуваняя повітряних суден і авіадвигунів ” та “Технології і технологічне обладнання аеропортів”. Загальне призначення вказаної методичної розробки - допомогти курсантам самостійно підготуватися до заліку по дисципліні “Теорія машин і механізмів” та виконати курсову роботу.
Зміст розробки складається з кінематичного аналізу типових важільних механізмів з поясненнями та прикладами розрахунків. В розробці вміщені діаграми та плани швидкостей і прискорень ланок важільних механізмів для випадків аналізу кривошипно-повзункових та кривошипно-коромислових механізмів. Детально викладено графоаналітичний метод розрахунків усіх сил, діючих на окремі ланки і механізм в цілому.
Методична розробка включає також графічну частину, яка складається з п'яти малюнків та трьох додатків. Загальний обсяг методичної розробки складає 10 др. аркуш.
Министерство образования Украины Славянский авиационный технический колледж
« Теория машин и механизмов »
Задание на курсовую работу
L Изучить кинематическую схему привода механизма.
2. Произвести структурный анализ заданного механизма.
3 Построить план положений механизма на рабочем и холостом ходах в принятом масштабе (формат А4)
Построить планы скоростей и ускорений на рабочем ходу приняв соответствующие масштабы (формат А4)
Графоаналитическим способом определить уравновешивающую силу на кривошипе (формат А4)
Построить диаграмму перемещения выходного звена и скорости в принятом масштабе.
Определить величину движущего момента на кривошипе граф&налитическим способом.
Объем графической части работы 1 -1,5 листа формата А1.
Пояснительная записка на 10-15 листах формата All.
Исходные данные для расчетов согласно варианта задания :
Руководитель проекта (работы) Дата подпись
Г. Славянск, 2014
I. Кинематический и силовой анализ (расчет) плоских рычажных механизмов
I. I. Кинематические исследования рычажного механизма.
Необходимо изучить кинематическую схему и работу механизма согласно заданного варианта. Вычертить кинематическую схему и схему привода. Выписать исходные данные для проектирования. По кинематической схеме определить входное и выходное звенья. Ведущее звено-кривошип и выходное звено-ползун, поршень, плунжер или коромысло. Установить вид движения для каждого звена механизма, их относительное движение и положение в плоскости. Определить класс кинематических пар и нумерацию звеньев механизма принять согласно заданной кинематической схемы.
По
формуле П. Л. Чебышева определить степень
подвижности механизма и расчленить его
на структурные группы по классификации
Ассура-Артобалевского (1,2). Построить
совмещенные планы положений механизмов
в принятом линейном масштабе
 l
м/мм,
для чего предварительно определить
крайние положения и углы поворота
ведущего звена, соответствующие рабочему
и холостому ходу. На совмещенном плане
должно быть не менее 12 положений механизма
(1,2). Графическое построение планов
положений для кривошипно ползунного
механизма приводится на рис. 1, а также
в приложениях №1-2.
l
м/мм,
для чего предварительно определить
крайние положения и углы поворота
ведущего звена, соответствующие рабочему
и холостому ходу. На совмещенном плане
должно быть не менее 12 положений механизма
(1,2). Графическое построение планов
положений для кривошипно ползунного
механизма приводится на рис. 1, а также
в приложениях №1-2.
.
. . Пользуясь
совмещенными планами положений, построить
график линейных перемещений ползуна в
масштабе
 м/мм по функции
м/мм по функции
 для кривошипно-ползунного механизма
или же график угловых перемещений
коромысла по функции
для кривошипно-ползунного механизма
или же график угловых перемещений
коромысла по функции
 в масштабе
в масштабе
 рад/мм согласно заданным значением
углов
рад/мм согласно заданным значением
углов
 и
и
 для кривошипно-коромыслового механизма.
Масштабы графиков перемещения.
для кривошипно-коромыслового механизма.
Масштабы графиков перемещения.
 или поворота
выходного звена выбрать такими, чтобы
максимальная ордината графика не
привышала 100 .
. . 120
мм.
или поворота
выходного звена выбрать такими, чтобы
максимальная ордината графика не
привышала 100 .
. . 120
мм.
Масштаб
на оси абцисс выбрать так, чтобы полный
угол поворота начального звена на
 соответствовал циклу работы механизма
на базовой длине
соответствовал циклу работы механизма
на базовой длине

Тогда масштабные коэффициенты будут определены по формулам:
 или
или
Определяют период одного полного поворота начального звена или время цикла механизма и коэффициент времени по формуле:
Рис 1.1. План механизма – совмещенных положений

1 – кривошип; 2 – шатун; 3 – ползун; D – направляющая; O – стойка
 ;
;

Где
 – заданная частота вращения кривошипа
являющегося звеном начальным.
– заданная частота вращения кривошипа
являющегося звеном начальным.
I.2. Определение скоростей и ускорений выходного звена методом диаграмм.
Этот
метод применяют в тех случаях, когда
дальнейшее решение задач курсового
проектирования не требует конкретных
значений кинематических параметров
характерных точек механизма – центров
тяжести ЦТ, центров вращательных
кинематических пар ЦВКП, точек приложения
сил и др. Определяют параметры движения
только исполнительного звена, совершающего
вращательное и поступательное движение.
Метод диаграмм для определения скорости
выходного звена основан на графическом
дифференцировании диаграммы перемещений,
как показано на рис. 2 – 3. Координатную
ось
 графика размещают по ординате продолжении
оси
графика размещают по ординате продолжении
оси
 графика перемещений
или
,
а координатная ось абцисс с параметрами
графика перемещений
или
,
а координатная ось абцисс с параметрами
 остается без изменений. Для дифференцирования
графика перемещения выберем на оси
абсцисс точку
остается без изменений. Для дифференцирования
графика перемещения выберем на оси
абсцисс точку
 на произвольном расстоянии
на произвольном расстоянии
 от начала координат – плюс дифференцирования.
от начала координат – плюс дифференцирования.
Графическое
дифференцирование можно проводить
методом хорд или касательных. Первый
метод предпочтительнее. Для этого
плавную кривую перемещения ползуна или
коромысла заменяют ломаной, состоящей
из ряда последовательно расположенных
хорд на участках между точками кривой
0-1ʹ, 1ʹ-2ʹ, 2ʹ-3ʹ, и т.д. по всему циклу на
базовой длине

Из полюса расположенного в точке на расстоянии / обычно не более 50 ...80 мм/ параллельно соответствующим хордам проводят лучи 0–1ʹ, 1ʹ–2ʹ и т.д. до пересечения с осью ординат. Через точки пересечения лучей с осью ординат проводят линии, параллельные оси абцисс до пересечения с ординатами середин соответствующих участков /интервалов/ дифференцирования по оси абсцисс с параметрами . В пересечении получим точки 1ʺ, 2ʺ, 3ʺ и т.д., соответствующие производной пути по времени:
Где
 - угловая скорость кривошипа;
- угловая скорость кривошипа;
 -
аналог скорости при
-
аналог скорости при

Рис 1. 2.
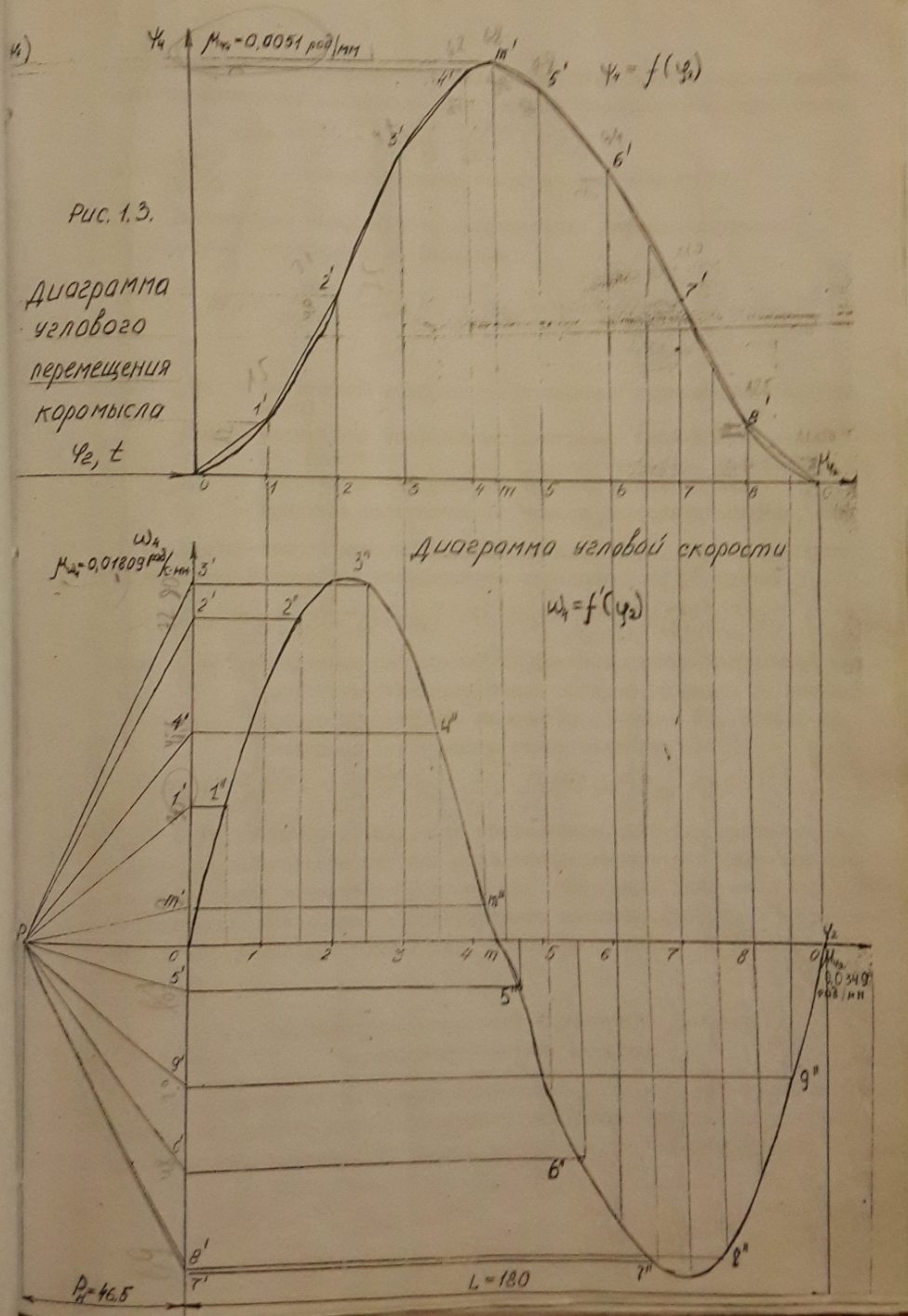
Рис 1. 3. Диаграмма углового перемещения коромысла
Для кривошипно-коромыслового механизма графическое дифференцирование производится аналогично для функции поворота выходного звена:
Где
 - аналог угловой скорости при
- аналог угловой скорости при

Масштабные
коэффициенты графического дифференцирования
 определяют по формулам:
определяют по формулам:

Где - масштабный коэффициент диаграммы перемещения ползуна, м/мм;
- масштабный коэффициент диаграммы перемещения коромысла, рад/мм;
 -
масштабный
коэффициент времени цикла, с/мм;
-
масштабный
коэффициент времени цикла, с/мм;
- принятое расстояние от полюса дифференцирования, мм.
Дифференцируя кривую скорости методом хорд, строят диаграмму ускорений. Масштабные коэффициенты определяют по формулам:
 ;
;

Где
 - полюсное расстояние при дифференцировании
полученной кривой скорости перемещения
ползуна (формула I) или скорости
перемещения коромысла (формула 2). Вторая
производная будет иметь такую
зависимость:
- полюсное расстояние при дифференцировании
полученной кривой скорости перемещения
ползуна (формула I) или скорости
перемещения коромысла (формула 2). Вторая
производная будет иметь такую
зависимость:

Следует иметь в виду, что графическое дифференцирование дает значительные погрешности при определении параметров движения выходного звена механизма. Поэтому при построении диаграмм скоростей и ускорений необходимо корректировать значение скоростей и ускорений в экстремальных точках так, чтобы погрешность не превышала 5%.
1.3. Определение скоростей и ускорений звеньев графоаналитическим методом.
Для
одного из положений кривошипно-шатунного
механизма на рабочем ходу строим
план скоростей и ускорений, исходя из
условия, что скорость вращения кривошипа
постоянна :

Вычерчиваем
в масштабе
 одно положение
звеньев механизма, взятое
одно положение
звеньев механизма, взятое
из совмещенного плана положений, как показано на рис. П1.а.
Оно
изображает кинематическую схему
механизма в заданном положении Точка
 -
центр вращения кривошипа /звено 2/ вокруг
неподвижной стоки /звено I/. Точка
-
центр вращения кривошипа /звено 2/ вокруг
неподвижной стоки /звено I/. Точка
 является вращательной кинематической
парой двух соединенных звеньев - шатуна
3 и кривошипа 2
и
одновременно есть ЦВКП этих звеньев.
Вектор скорости
является вращательной кинематической
парой двух соединенных звеньев - шатуна
3 и кривошипа 2
и
одновременно есть ЦВКП этих звеньев.
Вектор скорости
 кривошипа
направлен перпендикулярно к радиусу-вектору
траектории движения т.е.
к
кривошипа
направлен перпендикулярно к радиусу-вектору
траектории движения т.е.
к
 .
Его направление совпадает с направлением
угловой скорости
.
Его направление совпадает с направлением
угловой скорости
 .По величине /модулю/ скорость точки
.По величине /модулю/ скорость точки
 определяется из уравнения:
определяется из уравнения:

Точка
 есть
ЦВКП, образуемой звеньями 3 и 4 /на
кинематической схеме механизма это
соединительное звено 3 - шатун и выходное
звено 4 - ползун/. Точку
можно рассмотреть также как совокупность
двух точек – точки
есть
ЦВКП, образуемой звеньями 3 и 4 /на
кинематической схеме механизма это
соединительное звено 3 - шатун и выходное
звено 4 - ползун/. Точку
можно рассмотреть также как совокупность
двух точек – точки
 ,
принадлежащей ползуну 4, и точки
,
принадлежащей ползуну 4, и точки
 принадлежащей
стойке I, которые образуют поступательную
кинемати-ческую пару. Используя теоремы
механики
принадлежащей
стойке I, которые образуют поступательную
кинемати-ческую пару. Используя теоремы
механики
 для плоско-паралельного движения о
распределении скоростей точек плоского
тела и о сложно движении плоского тела,
можно определить скорость точки
для плоско-паралельного движения о
распределении скоростей точек плоского
тела и о сложно движении плоского тела,
можно определить скорость точки
 ,
принадлежащий шатуну 3 и скорость точки
,
принадлежащий ползуну 4 в виде двух
векторных уравнений:
,
принадлежащий шатуну 3 и скорость точки
,
принадлежащий ползуну 4 в виде двух
векторных уравнений:

 ;(10)
;(10)
Скорости
 равны, так точка
одновременно является ЦВКП двух звеньев
3 и 4, а скорость точки
,
принадлежащей стойке I,
равна нулю. Скорость
равны, так точка
одновременно является ЦВКП двух звеньев
3 и 4, а скорость точки
,
принадлежащей стойке I,
равна нулю. Скорость
 по модулю является скоростью поступательного
движения ползуна 4 относительно
неподвижной направляющей /стойки I/.
по модулю является скоростью поступательного
движения ползуна 4 относительно
неподвижной направляющей /стойки I/.
3.1. Построение плана скоростей.
На
основании теоремы о плоско-параллельном
движении
и
зная направления векторов составляющих
уравнение /10/ можно в принятом в
принятом масштабе
 построить
план скоростей механизма в заданном
положении. Для этого на чертеже произвольно
выбираем точку
построить
план скоростей механизма в заданном
положении. Для этого на чертеже произвольно
выбираем точку
 -
полюс плана скоростей и от нее откладываем
вектор скорости кривошипа
-
полюс плана скоростей и от нее откладываем
вектор скорости кривошипа
 на расстоянии
на расстоянии
 перпендикулярно
перпендикулярно
 в направлении угловой скорости
в направлении угловой скорости
 .
рис. П.1.б./.
В точке
.
рис. П.1.б./.
В точке
 отрезка
отрезка
 проводим
линию, перпендикулярную шатуну
проводим
линию, перпендикулярную шатуну
 .
По этой линии направляем вектор скорости
относительного движения точки
вокруг точки
или
.
По этой линии направляем вектор скорости
относительного движения точки
вокруг точки
или
 . Решая уравнения / 10 / этой системы
определим скорость направления ползуна
. Решая уравнения / 10 / этой системы
определим скорость направления ползуна
 .
Из полюса
проводим линию, параллельную направляющей
.
Из полюса
проводим линию, параллельную направляющей
 ,
являющейся траекторией движения ползуна
до пересечения с вектором
,
являющейся траекторией движения ползуна
до пересечения с вектором
 в точке “
в точке “ ”
.
Так как
”
.
Так как
 ,
то отрезок
,
то отрезок
 полученный при пересечении двух линий
на плане скоростей в масштабе
полученный при пересечении двух линий
на плане скоростей в масштабе
 ,
изображает полную скорость точки
или
скорость ползуна
,
изображает полную скорость точки
или
скорость ползуна
 .
Умножая этот отрезок, взятый из чертежа,
на масштабный коэффициент
получим абсолютное значение скорости
ползуна:
.
Умножая этот отрезок, взятый из чертежа,
на масштабный коэффициент
получим абсолютное значение скорости
ползуна:

Аналогично
из плана скоростей определим скорость
относительного движения точки
.
Для этого измеряем отрезок
 и умножаем его на масштабный коэффициент:
и умножаем его на масштабный коэффициент:
 .
Скорость точки
.
Скорость точки
 ,
являющейся ЦМ звена 3, определим на
основании свойства подобия плана
скоростей, так как по условию положения
точки
должно быть задано. Точка
будет располагаться на отрезке
плана скоростей на расстоянии от точки
“
”
заданном из отношения:
,
являющейся ЦМ звена 3, определим на
основании свойства подобия плана
скоростей, так как по условию положения
точки
должно быть задано. Точка
будет располагаться на отрезке
плана скоростей на расстоянии от точки
“
”
заданном из отношения:

Где
 – положение Цм звена 3 /шатуна/;
– положение Цм звена 3 /шатуна/;
AB
– длина
звена 3 ( )
)
Соединяя
точку
на плане скоростей с полюсом
получим отрезок
 ,
характеризующий скорость
,
характеризующий скорость
 В принятом масштабе
В принятом масштабе

Определим
угловую скорость шатуна по формуле :
:
Направление угловой скорости шатуна указывает вектор , если его поместить в точку плана положений. См. рис. 1.1 и 1.4.
Величина
скорости выходного звена для заданного
положения
 сравнивается со скоростью, взятой из
диаграммы скоростей, приведенной на
рис. 2. Абсолютная погрешность в определении
скоростей может быть определена по
формуле
:
сравнивается со скоростью, взятой из
диаграммы скоростей, приведенной на
рис. 2. Абсолютная погрешность в определении
скоростей может быть определена по
формуле
:

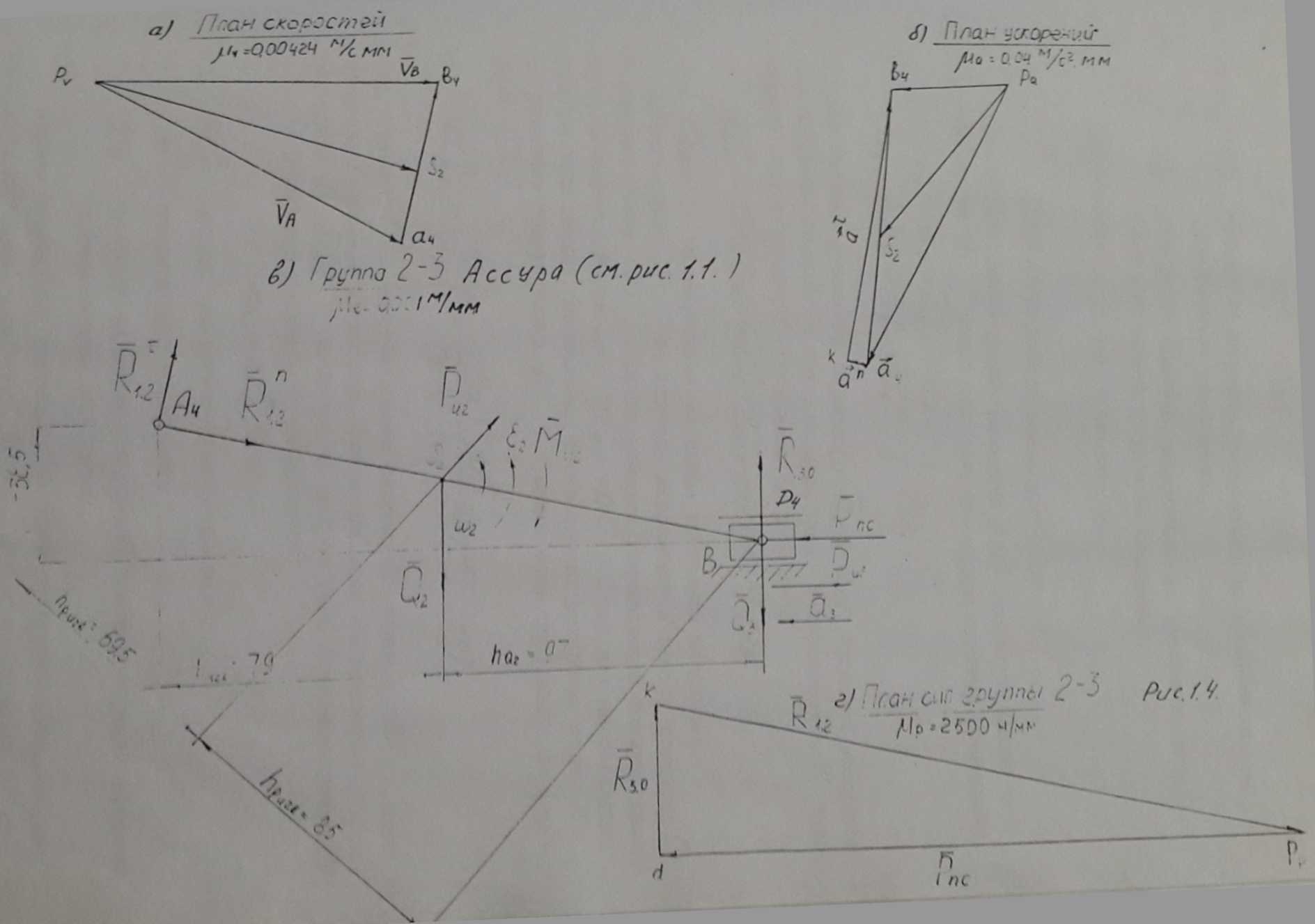
Рис 1.4.
Где
 – скорость ползуна, полученная из плана
скоростей для данного положения;
– скорость ползуна, полученная из плана
скоростей для данного положения;
 -
скорость ползуна, полученная из диаграммы
скоростей для одного и того же положения.
-
скорость ползуна, полученная из диаграммы
скоростей для одного и того же положения.
Погрешность не должна превышать 5%