

Типы адаптивных систем аэп. Предельная передаточная функция беспоисковой системы аэп с сигнальной самонастройкой.
Объект регулирования в процессе работы меняет свои параметры. Это вызвано нелинейностью характеристик самих объектов, действием возмущений (изменением температуры, напряжения сети, времени, момента нагрузки) и временным старением. Поэтому любая настройка является оптимальной лишь в расчетной точке. Во всех остальных случаях настройка системы отличается от оптимальной. Если изменения параметров небольшие (20-30)%, то это не приводит к существенным изменениям качества и с этим приходится мириться. Если изменения существенные (настройка контура тока в АВК, ТП-ДПТ при переходе из режима непрерывного тока в режим прерывистых токов), приходиться изменять параметры регуляторов, либо структуру регулирования для сохранения оптимальной настройки. Системы, в которых реализуется такая функция, называются адаптивными.
Обобщенная структурная схема адаптивного АЭП представлена на рисунке 7.1, где приняты обозначения: БАУ – блок адаптивного управления; БОИ – блок обработки информации; БППР – блок перестройки параметров регулятора.
БАУ = БОИ + БППР
Рисунок 7.1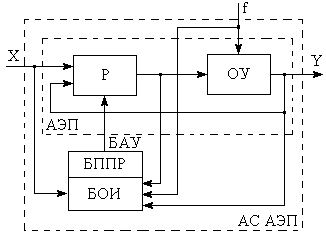
1) При произвольном изменении параметров объекта необходимо так изменять параметры регулятора, чтобы сохранялась оптимальная настройка системы (в этом случае предполагают, что система была оптимизирована, и эта настройка сохранилась бы). Эта задача решается в беспоисковых адаптивных системах.
2) При начальном отсутствии информации о параметрах объекта и воздействие на систему необходимо производить поиск оптимальных режимов работы. Эта задача решается в поисковых адаптивных системах АЭП.
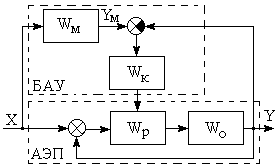
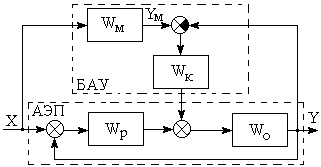
присутствуют в явном виде, называются системами с эталонными моделями. Их структуры представлены на рисунке 7.3а, б, где приняты обозначения: Wм – модель замкнутой системы; Wк – корректирующее звено.
Вариант б) – случай адаптивной системы с сигнальной самонастройкой. В случае, когда параметры объекта являются расчетными, фактические и желаемые сигналы будут совпадать, и поэтому сигнал с корректирующего звена равен нулю. При изменении параметров в объекте фактический сигнал будет отличаться от желаемого, что будет приводить к формированию сигнала на выходе корректирующего звена, который, алгебраически суммируясь с сигналом регулятора, формирует такое воздействие на объект, при котором фактический сигнал будет приближаться к желаемому.
![]() – передаточная
функция замкнутой адаптивной системы.
– передаточная
функция замкнутой адаптивной системы.
y = хyWp + yм yWк W0;
yм = XWм;
y= хWpW0 –yWpW0 + xWмWкW0 – yWкW0;
y(1+WpW0 +WкW0) = х(WpW0 +WмWкW0);
![]() ,
,
Wк = Кк .
Передаточная функция такой замкнутой системы независимо от изменения параметров объекта стремится к передаточной функции модели, поэтому переходные процессы по управляющему воздействию Х будут оптимальными и стабилизированными, т.е. не будут изменяться при изменении параметров объекта. Такую сигнальную настройку применяют в системах АВК для сохранения оптимальной настройки в контуре тока при изменении скорости.
Достоинство – простая техническая реализация (пассивный фильтр с операционным усилителем).
Недостатки:
- применяется только для небольших изменений параметров в объекте (20-30-40)%;
- такие системы обеспечивают оптимальность настройки только по задающему сигналу, по возмущающему воздействию система оптимальность не обеспечивает.