

Оценка влияния внутренней обратной связи по эдс на процессы в контуре тока
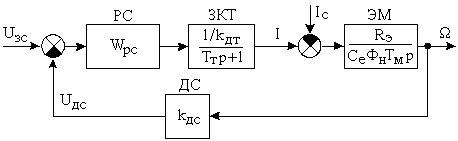
Структурная схема контура тока с учетом влияния внутренней обратной связи по ЭДС представлена на рисунке 5.24.
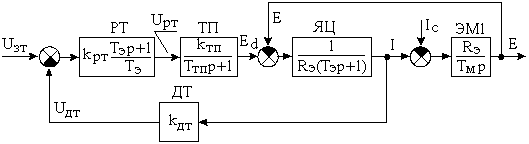
Передаточная функция звена якорной цепи с учетом влияния внутренней обратной связи по ЭДС
 .
.
Передаточная функция звена якорной цепи обладает дифференцирующими свойствами, благодаря чему компенсируется интегральные свойства регулятора.
Определим передаточную функцию замкнутого контура тока для данного случая с регулятором, оптимизированным в режиме заторможенного двигателя.
где
![]() .
.

УР:
 .
.
 ;
;  ,
,
где Iз – заданная величина ток в контуре тока в случае заторможенного ЭП.
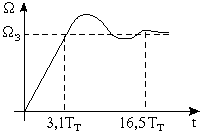
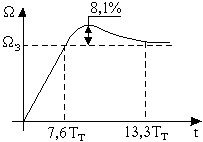
Графики переходных процессов контура тока при заторможенном и расторможенном двигателе представлены на рисунке 5.25.
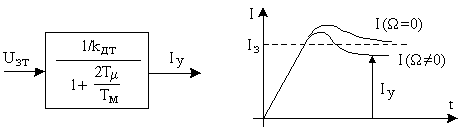
Контур тока, который с ПИ-регулятором был астатическим при заторможенном роторе, становится статическим в переходном режиме (Е 0). Ошибка регулирования тем больше, чем меньше постоянная времени Тм. Другое следствие влияния ОС по ЭДС это увеличенное перерегулирование. По отношению к новому установившемуся уровню тока перерегулирование увеличивается, но по абсолютной величине остается тем же.
Если ЭП имеет большую Тм, то за время выхода тока на заданный уровень ЭДС электродвигателя практически не меняется и ее влияние на ток минимально.
В ЭП с высокомоментными ЭД, где Тм мала, влияние внутренней ОС по ЭДС существенно, что иногда приходится учитывать изменением передаточной функции регулятора.
Если передаточная функция якорной цепи может быть представлена в виде апериодического звена второго порядка с передаточной функцией
![]() ,
,
где Т1 + Т2 = Тм; Т1Т2 = ТмТэ.
Тогда, оптимизируя контур тока на МО, будем иметь более сложный регулятор
![]() ,
,
где Тиз = Т1; Ту = Т2; Т1 > Т2;
Это регулятор типа (ПИ)2, реализация которого сложна и применяется редко.
7. Оптимизировать контур скорости однократноинтегрирующей системы аэп. Дать оценку жесткости скоростных характеристик. Однократноинтегрирующая система аэп
Структурная схема контура скорости представлена на рисунке 5.26.
Iс = 0.
![]() ;
;
![]() .
.
С этим П-регулятором система астатична по заданию и статична по возмущению. В целом система статическая.
где Тс = 2Тт – эквивалентная постоянная времени оптимизированного на МО контура скорости.
![]() .
.
УР:
![]() .
.
График переходного процесса контура скорости представлен на рисунке 5.27. Такой характер переходного процесса будет в том случае, если все звенья системы являются линейными (не выходят на ограничение регулятора скорости). С данным регулятором контур скорости является астатическим первого порядка по заданию.
Рисунок
5.27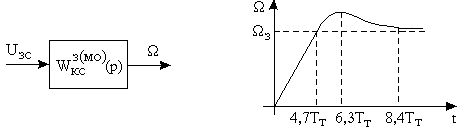
При подаче линейного сигнала задания появляется ошибка по скорости, т.е. система является статической по заданию. Порядок астатизма равен номеру производной во входном сигнале, при котором контур становится статическим, т.е. появляется ошибка по скорости.
Передаточная функция контура скорости по возмущению
![]() ;
;
УР:
![]() .
.
По возмущению контур скорости является статическим. Величина ошибки пропорциональна Iс.
![]() ;
;
В некоторых случаях
получается
![]() .
.
8.Оптимизировать контур скорости двухкратноинтегрирующей схемы АЭП. Дать оценку жесткости скоростных характеристик.
Структурная схема контура скорости представлена на рисунке 5.26.
СО:
СО:
![]() ;
;
![]() .
.
Получили ПИ-регулятор, у которого kрс(со) = kрс(мо); Тиз = 4Тт.
![]() .
.

График переходного процесса контура скорости представлен на рисунке 5.28а. Такой переходный процесс будет только пока все звенья контура линейные (пока регулятор скорости не вышел на ограничение) и это возможно при подаче лишь малых сигналов задания.
Такой переходный процесс в системах ЭП нежелателен, поэтому для уменьшения перерегулирования на входе включают фильтр.
![]() ,
,
где Тс(со) = 4Тт – эквивалентная постоянная времени оптимизированного на СО контура скорости.
Тс(мо) = 2Тт;
Тс(со) = 4Тт.
График переходного процесса контура скорости с фильтром на входе представлен на рисунке 5.28б.
Контур скорости, оптимизированный на СО с фильтром на входе имеет быстродействие вдвое меньшее, чем контур, оптимизированный на МО.
Данный контур скорости является по заданию астатическим второго порядка (только при наличии 2-й производной во входном сигнале появляется ошибка). Астатизм достигнут за счет уменьшения быстродействия.
При нелинейно изменяющемся входном сигнале задания на скорость на выходе регулятора будет сигнал, полученный в результате интегрирования и запоминания интегральной части регулятора. При появлении скоростной ошибки сигнал на выходе регулятора скорости будет изменяться, что будет приводить к изменению сигнала задания на ток и соответственно тока, что свидетельствует о переходных процессах в приводе. Скоростная ошибка в этой системе по заданию возможна только в начале и в конце отработки линейно изменяющегося сигнала задания.
Передаточная функция контура скорости по возмущению
![]() ;
;
УР:
![]() .
.