

12.2 Жесткость системы (коэффициент упругого сопротивления)
Под жесткостью понимаем обобщенную нагрузку (линейную силу Р или крутящий момент М), вызывающую обобщенную деформацию (соответственно, линейную или угловую ) в данной точке, равную единице. Очевидно, что полная деформация ( или ) может быть определена путем деления действующей на систему нагрузки Р или М на ее жесткость С:
![]() ;
; ![]() . (12.1)
. (12.1)
С другой стороны, деформация системы может быть определена методами сопротивления материалов. Так, например, деформация изображенного на рис. 12.3 стержня в соответствии с законом Гука будет равна:
![]() . (12.2)
. (12.2)
Из выражений (12.1) и (12.2) имеем жесткость стержня при растяжении, равную:
![]() .
.
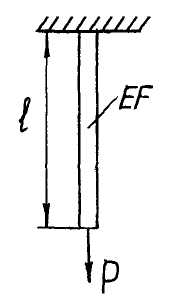
Рисунок 12.3
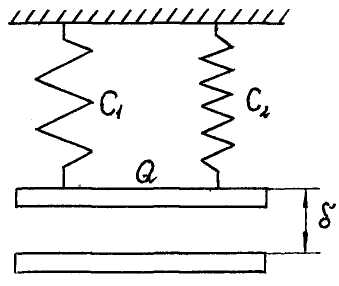
Рисунок 12.4
12.3 Жесткость системы при параллельном соединении упругих
элементов
Пусть жесткая балка весом Q подвешена на пружинах жесткостью С1 и С2 (рис. 12.4). Очевидно, всегда можно так подвесить балку и распределить её вес по пружинам, что каждая из пружин растянется на одну и ту же величину . Обозначим часть веса балки, приходящуюся на каждую из пружин, соответственно, Q1 и Q2. Очевидно, что Q = Q1 + Q2. Заменив в соответствии с формулой (12.1) Q = C; Q1 = С1 и Q2 = С2, имеем:
![]() ,
,
или
![]() .
.
Следовательно, при параллельном соединении упругих элементов жесткость системы равна сумме жесткостей упругих элементов, ее составляющих:
![]() .
.
12.4 Жесткость системы при последовательном соединении упругих
элементов
При последовательном соединении пружин (рис. 12.5) на каждую из них действует вес груза Q. Очевидно, что:
![]() ,
,
или, в соответствии с формулой (12.1):
![]() ;
; ![]() .
.
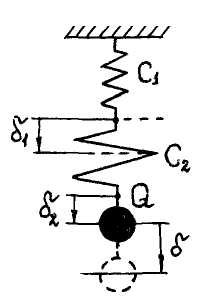
Рисунок 12.5
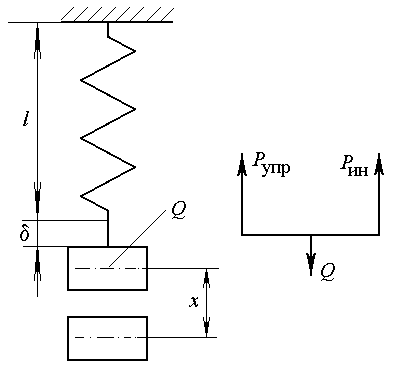
Рисунок 12.6
Окончательно имеем:
![]() .
.
Таким образом, при последовательном соединении упругих элементов величина, обратная жесткости системы, равна сумме величин, обратных жесткости упругих элементов, ее составляющих.
12.5 Свободные колебания систем с одной степенью свободы.
Колебания без затухания
В данном случае и в дальнейшем ограничимся рассмотрением таких колебаний, для которых справедлив закон Гука и принцип независимости действия сил.
Рассмотрим простейшую систему, состоящую из груза, подвешенного на вертикально расположенной пружине (рис. 12.6). Влиянием собственного веса пружин пренебрегаем. Направим ось x вдоль оси пружины вниз.
За начало отсчета 0 возьмем положение статического равновесия груза Q.
В этом положении пружина растянута на величину = Q/C, где С жесткость пружины. Рассмотрим движение груза в произвольный момент времени t. Отклонение центра массы груза в этот момент от положения статического равновесия вниз обозначим через х. Получаем:
![]() ;
; ![]() ;
; ![]() .
.
При составлении уравнения движения будем исходить из принципа Даламбера, который заключается в том, что к движущейся с ускорением системе применимы соотношения статики при условии, что в число внешних сил включена фиктивная сила инерции, равная произведению массы на ускорение и направленная против ускорения. Полагаем, что скорость dx/dt и ускорение d2x/dt2 совпадают по направлению с отклонением X. При отклонении груза возникает упругая сила Рупр которая стремится вернуть груз в состояние равновесия и потому называется восстанавливающей силой.
Дифференциальное уравнение колебаний получим, спроектировав все действующие силы на вертикальную ось:
![]() .
.
Отсюда имеем:
![]() , (12.3)
, (12.3)
Или
![]() , (12.4)
, (12.4)
где
![]() .
.
Решением уравнения (12.3) будет:
![]() . (12.5)
. (12.5)
где А и В постоянные интегрирования, зависящие от начальных условий, т.е. от положения груза m = Q / g и его скорости dx/dt в момент времени t = 0.
Если заданы начальная координата груза х0 и начальная скорость 0, то из (12.5) определим:
![]() ;
; ![]() .
.
Полагая
![]() и
и
![]() , (12.6)
, (12.6)
решение (12.5) можно представить в виде:
![]() . (12.7)
. (12.7)
или
![]() ,
,
где амплитуда колебаний, определяемая формулой:
 .
.
Величина 0t + называется фазой колебаний, а величина сдвигом фазы. На основании (12.7) может быть определена из условия tg = х00/0.
Уравнение (12.7) выражает процесс чисто периодического собственного колебания системы. График его представлен на рис. 12.7.
Период колебаний Т определяется из условия, что при увеличении времени t на величину Т аргумент, стоящий под знаком синуса, изменится на 2:
![]() .
.
Период представляет собой время, в течение которого совершается одно колебание. Если Т время одного колебания, то в 2 секунд будет происходить 0 колебаний. Поэтому величина 0 и носит название круговой частоты (в отличие от секундной частоты f = 1/Т):
![]() .
.
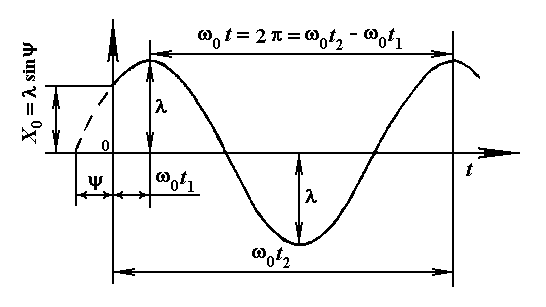
Рисунок 12.7
Круговую частоту часто называют частотой собственных колебаний системы, поскольку она, как это видно из (12.4), зависит не от начальных обстоятельств колебательного процесса, а от величины колеблющейся массы и жесткости системы. Формуле (12.4) можно придать вид:
![]() , (12.8)
, (12.8)
где g ускорение свободного падения, м/с2; с статическое удлинение пружины под действием груза Q.