

25. Основные задачи диагностики технических объектов и систем управления (см. 26 вопрос)
26. Структура типовой системы диагностики
Диагностика технического объекта (ТО) – это оценка текущего состояния объекта и сравнение его с эталонными состояниями.
Процедура диагностики предполагает решение задач классификации.
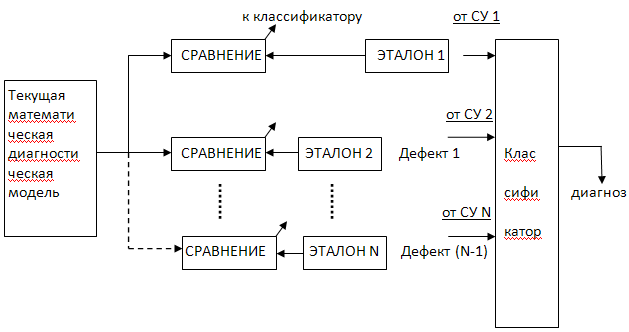
ЭТАЛОН 1 – бездефектное состояние модели (эталон 1 должен быть в любой модели)
Последующие эталоны характеризуют наличие какого-либо дефекта.
Отказы бывают перемежающиеся и постоянные.
Еще одна задача диагностики оценка ресурсов (нужно оценить вероятностную бездефектную работу объекта).
На этом этапе разработки ОУ констр. расчет на основании опыта расчетных данных; определяются самые слабые узлы объекта. В этом случае СД должна отслеживать состояние именно этих узлов. Системы диагностики разделяются на 2 группы: 1. предполагает использование текстовых диагностических сигналов (это, как правило, при стендовых испытаниях) 2. предполагает оценку текущего состояния объекта в режиме его нормального функционирования.
27. Распределение задачи диагностики по уровням
вы
28. Применение пространственно-временных спектральных преобразований при построении диагностических моделей



Вектор диагностических признаков представляет собой математическую модель.
П араметры
должны быть связаны с состоянием
объекта.
араметры
должны быть связаны с состоянием
объекта.


Параметры диагностической модели получены исходя из измеряемых сигналов.


 – вектор входных возбуждающих сигналов
– вектор входных возбуждающих сигналов
 – вектор, характеризующий параметры
объекта, который необходимо контролировать
– вектор, характеризующий параметры
объекта, который необходимо контролировать


Решение задачи диагностики:

Зависимость состояния a1, a2 ... не зависит от r.
Уравневое решение задачи диагностики.
В теории решение представляется на 3-х уровнях:
Отсутствие / наличие дефекта.
Локализация места дефекта.
Определение места, входа дефекта и его характеристика (т.е. размер)
Эти 3 уровня могут быть выполнены 2-мя способами:
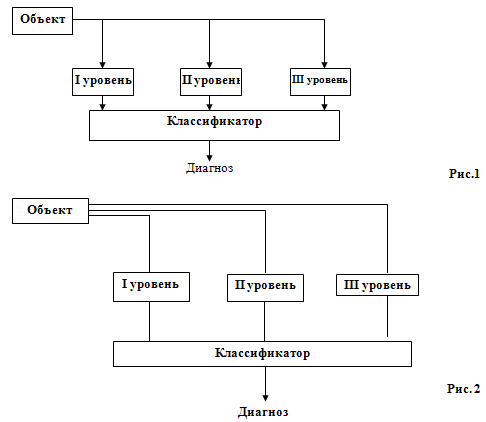
На рис.1 поступает на I, II, III уровни одинаковая информация.
Решение задачи I уровня более простое в отличие от II и III, работают в режиме реального времени.
На рис.2 для I, II, III уровней поступает различная информация как по объему, так и по содержанию. Решают в одном и том же режиме реального времени. Рис.2 более специализированная структура.
Использование пространственно-временных спектров для решения задачи диагностики.
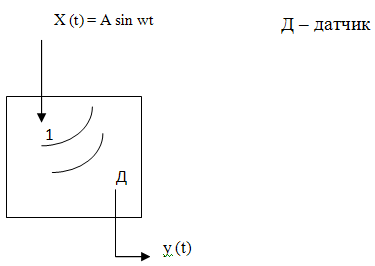
В 1 поступает механический сигнал с амплитудой А.

При наличии трещины информация, содержащаяся в сигнале, будет значительно отличаться от сигнала, где не трещины.
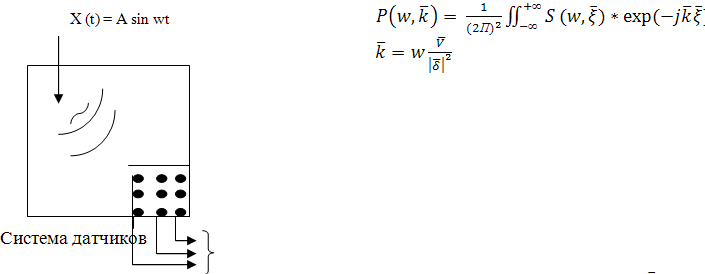
Если имеется система датчиков, то место
расположения датчиков определяется

 – волновое число обратное скорости
распространения в среде
– волновое число обратное скорости
распространения в среде
 – скорость распределений
– скорость распределений
P – пространственно-временной спектр
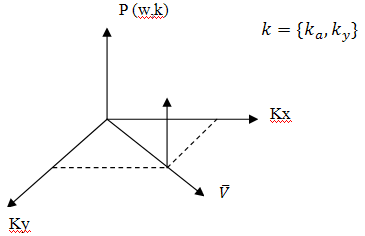
определяется если соединить точки находящиеся на плоскости чисел и началом координат.
Можем определить, откуда идет сигнал, т.е. можем определить, где находится дефект.
Если в 1 поступает сигнал из набора сумм
гармонических колебаний, то спектр
будет выглядеть так:

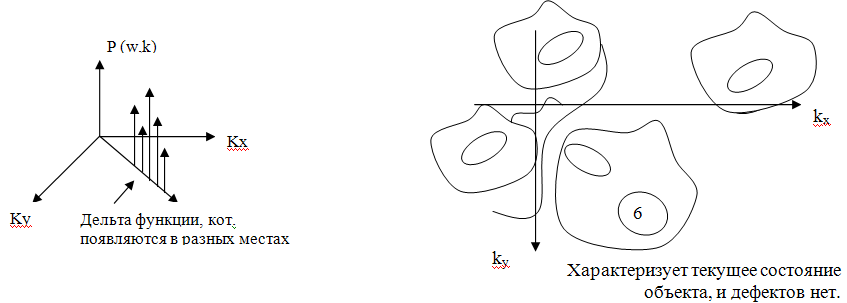
В случае дефекта числа могут меняться, вершины могут дрейфовать, и могут появляться новые вершины.