

1. Применение метода наименьших квадратов при экспериментальном определении статических характеристик объектов управления. (ответ на вопрос построение…)
Пусть априори мы имеем дело с линейным объектом. y=b0+b1x Наклон определяется как tgα.
 Т.к есть помехи по факту
Т.к есть помехи по факту
b0 - ? b1 -?
Введем фиктивную координату х0 =1, х=х1, получим.
y=b0+b1x (1)
y=b0+b1x1 (2)
y=b0x0i+bix1i , где i=1..N (3) это некорректное равенство.
ei=yi-b0x0i-bix1i (4) помеха
МНК: (5)
(5)
 ,
,
 (6)
(6)
 (7)
(7)
 (8)
(8)

 =
(9)
=
(9)
Пусть для реальных объектов имеет координаты x1
y=b0x0+b1x1+ b2x2+ …bкxк . Т. е. характеристика в пространстве [x1… xk]

 =
=
Метод можно так же использовать для нелинейных зависимостей.
y=b0xα
ln y=ln b0 = α lnx
w= b0 + b1 x переход в линейную область.
w=ln y
B0=ln b0
b1 =α
2. Применение полного факторного эксперимента при определении статических характеристик объектов управления.
Д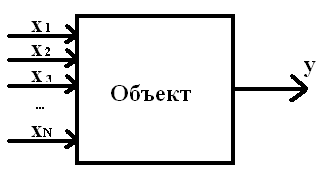 опустим
имеется всего 5 координат: х1 х2
х3 х4 х5 . Каждому
параметру будем давать всего 5 значений.
Тогда количество экспериментов нужно
провести N=55=3125
опустим
имеется всего 5 координат: х1 х2
х3 х4 х5 . Каждому
параметру будем давать всего 5 значений.
Тогда количество экспериментов нужно
провести N=55=3125
х1, х2 … хk – факторы (входные сигналы)
у – функция отклика
Чтобы провести факторный эксперимент:
Нужно чтобы все факторы были управляемы (их можно изменить по желанию экспериментатора).
Факторы должны быть измеряемы с требуемой точностью.
Факторы должны быть совместимы (по технологическим условиям все забранные значения факторов разрешены). Т.е. подавать на вход можно только то, что разрешено.
При проведении ПФК2к каждый из факторов принимает только 2 значения.
П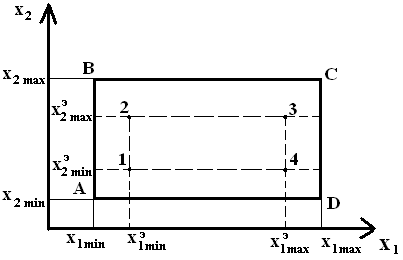 роведение
эксперимента:
роведение
эксперимента:
АВСД – область варьирования факторов. (определяются min и max каждого фактора, т.е. ТУ).
Внутри АВСД определяются значения факторов, которые задаются в процессе проведения эксперимента.
Точки 1, 2, 3, 4 – это экспериментальные min и max, они могут быть только в АВСД, но не за ней и не на границе.
-1 («-») – minэ значение факторов
+1 («-») – maxэ значение факторов
Составим матрицу планирования: ПФК23 (т. е. 3 фактора) N=23=8 экспериментов
y=b0x0 +b1x1+b2x2+b3x3 (x0=1 фиктивный столбец)
-
№
x0
x1
x2
x3
x1x3
y
1
+
+
+
+
+
y1
2
+
-
+
+
-
y2
3
+
+
-
+
+
y3
4
+
-
-
+
-
y4
5
+
+
+
-
-
y5
6
+
-
+
-
+
y6
7
+
+
-
-
-
y7
8
+
-
-
-
+
y8
 Свойства:
Свойства:
Свойство симметричности:
 =0,
i=1...k
=0,
i=1...kСвойство нормировки:
 =N,
i=1...k
=N,
i=1...kСвойство ортогональности:
 ,
i=1...k,
p=1...k,
i≠p
,
i=1...k,
p=1...k,
i≠pСвойство рототабельности (т. е. все точки эксперимента равноправны в статистическом смысле).
Делаем оценку коэффициентов:
 =
=
 =
=
 =
=
 =
= ,
i=0...k
,
i=0...k
Метод можно применять и для линейных функций.
y=b0x0
+b1x1+b2x2+b3x3+
b13
x1x3
 =
=