

Форма № Н-6.01
КИЇВСЬКИЙ НАЦІОНАЛЬНИЙ УНІВЕРСИТЕТ
ТЕХНОЛОГІЙ ТА ДИЗАЙНУ
КАФЕДРА МАШИН ЛЕГКОЇ ПРОМИСЛОВОСТІ
Курсовий проект
з навчальної дисципліни «Основи розрахунку та конструювання типових машин»
на тему: «Метричний синтез та кінематичний аналіз типових механізмів машин галузі»
Варіант ХХ
Студента 4 курсу групи БМ-ХХ
напряму підготовки 6.050502 «інженерна механіка»
ХХХХХ Х. Х
(прізвище та ініціали студента)
Керівник доцент кафедри МЛП, доцент, канд. техн. наук Дворжак В. М.
(посада, вчене звання, науковий ступінь, прізвище та ініціали)
Національна шкала:
Кількість балів:
Оцінка ECTS:
Члени комісії:
-
(підпис)
(прізвище та ініціали)
(підпис)
(прізвище та ініціали)
(підпис)
(прізвище та ініціали)
м. КИЇВ – 20ХХ рік
Бланк завдання
ЗМІСТ
1. Метричний синтез та кінематичний аналіз кривошипно-коромислового чотириланкового механізму (спосіб 1) 4
2. Метричний синтез та кінематичний аналіз кривошипно-коромислового чотириланкового механізму (спосіб 2) 6
3. Кінематичний аналіз двокривошипного чотириланкового механізму 8
4. Метричний синтез дезаксіального кривошипно-повзунного механізму за величиною ходу повзуна при обмеженнях на значення коефіцієнту співвідношення довжин кривошипа і шатуна (λ) та допустимого кута тиску в кінематичній парі шатун-повзун ([Θ]) 10
5. Метричний синтез та кінематичний аналіз шестиланкового шарнірно-важільного механізму, який складається з механізму першого класу першого виду та двох приєднаних двоповодкових груп першого виду 11
ЛІТЕРАТУРА 13

1. Метричний синтез та кінематичний аналіз кривошипно-коромислового чотириланкового механізму (спосіб 1)
Завдання 1: Спроектувати кривошипно-коромисловий чотириланковий механізм, в якому обертальний рух кривошипа перетворюється в коливальний рух коромисла за гармонічним законом ψі = k·sin (φi + φ0). При цьому потрібно забезпечити, щоб пряма лінія, що з’єднує крайні точки траєкторії коромисла, проходила б через вісь обертання кривошипа. Прийняти, що вісь обертання кривошипа знаходиться в точці 1, а вісь коливання коромисла – в точці 4 (рис. 1.1). Кривошип здійснює рівномірний обертальний рух проти годинникової стрілки. Коромисло при повороті у крайнє (дальнє від осі кривошипа) положення складає з віссю абсцис кут β, який відраховується від осі абсцис проти годинникової стрілки. Допустимий кут тиску в кінематичній парі шатун-коромисло [Θ] ≤ 40°. Перевірити синтезований механізм за теоремою Ґрасґофа. Визначити функцію положення, аналоги кутової швидкості та кутового прискорення, кутові швидкості та кутові прискорення точок 2 та 3 синтезованого механізму за допомогою програми, створеної в середовищі математичного процесора MathCAD для розрахунку циклових механізмів. Результати кінематичного розрахунку механізму привести у вигляді таблиці даних та у вигляді графіків. Виконати анімацію (візуалізацію) кінематичної схеми механізму в MathCAD.
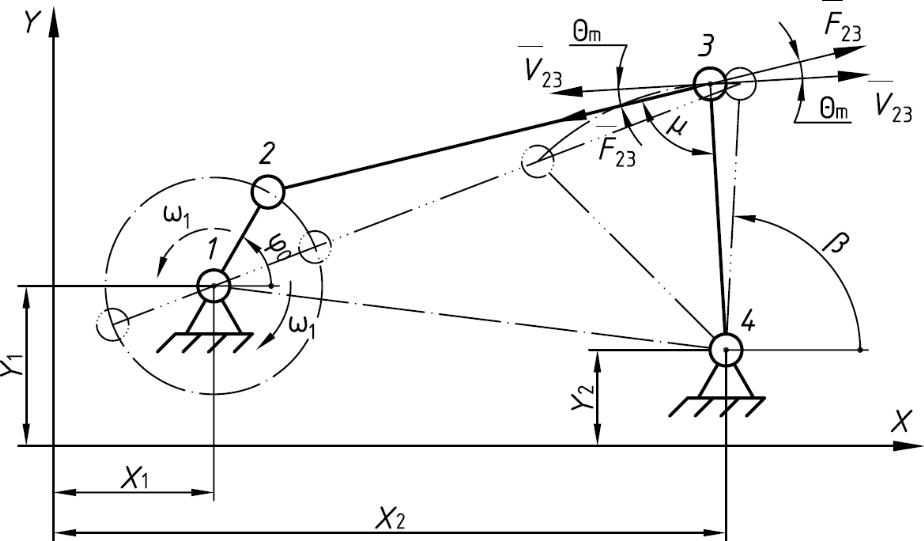
Рис. 1.1. Схема кривошипно-коромислового механізму