

2 Специальная часть
2.1 Разработка структурной схемы
Структурная схема разрабатываемого модуля гироскопа приведена на рисунке 2.1.

Рисунок 2.1 – структурная схема модуля гироскопа.
Выходной аналоговый дифференциальный сигнал гироскопа поступает на дифференциальный фильтр нижних частот с частотой среза 50 Гц, который фильтрует шумы перед АЦП, фильтрует сигнал вне полосы пропускания и выступает в качестве антиалиасингового фильтра. Отфильтрованный сигнал поступает на дифференциальные входы АЦП и после оцифровки поступает на модуль процессорный. Также гироскоп генерирует сигналы готовности, которые поступают на АЦП.
Напряжение ±7 В поступает с блока процессора, которое проходит через преобразователь и преобразуется в ±5 В и 3,3 В напряжение питания гироскопа. Также с процессорного блока поступает напряжение 7 В, которое проходит через преобразователь и преобразуется в 5 В напряжения питания ФНЧ и напряжения питания источника опорного напряжения, 5 В напряжения питания аналоговой части АЦП и 1,8 В напряжения питания цифровой части АЦП.
2.2 Разработка схемы электрической принципиальной
2.2.1 Анализ гироскопа
В качестве гироскопического элемента для модуля гироскопа используется Кориолисов вибрационный гироскоп INL-CVG-G200.
Гироскоп INL-CVG-G200 компании INNALABS – это двухосевой Кориолисов вибрационный гироскоп, отвечающий техническим требованиям инерциальных систем тактического класса, и характеризующийся низким уровнем выходного шума, широкой полосой пропускания, малым размером и малым весом, а также прочностью и высокой надежностью.
Твердотельные вибрационные гироскопы INL-CVG компании INNALABS по своим тактико-техническим характеристикам не имеют аналогов в мире. Высокая надежность и стабильность, низкий шум и доступная цена позволяют решать большой спектр задач пользователей из различных областей применения. Гироскопы ТВГ не содержат оптических, движущихся и микро-механических частей. При этом, в гироскопах INL-CVG достигнуты наилучшие показатели Стабильности смещения нуля и шума среди конкурентов в данном сегменте рынка.
Основные параметры гироскопа INL-CVG-G200:
– Стабильность смещения нуля в запуске < 0,1 °/ч
– Низкий уровень шума выходного сигнала (< 0,008 °/сек)
– Широкая полоса пропускания (150 Гц)
– Высокий показатель наработки на отказ 500000 ч)
– Запас прочности (удар 500g).
– Полное выходное сопротивление 82 Ом.
Гироскоп готов к использованию менее чем через 1 секунду после подключения питания, и выдаёт 2 аналоговых выходных сигнала, которые пропорциональны угловым вращениям вокруг 2-х чувствительных осей (с ограничением вращения до ±95 °/с).
Степень тестируемости системы достигает 95% благодаря функциям встроенного контроля (BIST) и заключительного испытания в контуре (FILT). Параметры гироскопа приведены в приложении Б.
В основе работы гироскопа INL-CVG лежит управление двумя стоячими волнами в физическом теле – резонаторе, который может быть как осесимметричным, так и неосесимметричным. При этом, осесимметричная форма резонатора позволяет достичь выдающихся характеристик гироскопа, а именно: значительно увеличить срок жизни гироскопа (Среднее время наработки на отказ > 500000 часов) и его удароустойчивость (500g, 0,5 мсек) [1].
ЧЭ состоит из цилиндрического резонатора, который имеет два основных резонансных режима второго порядка, возникающих на одной и той же частоте. Геометрическая форма каждого из основных резонансных режимов принимает форму эллиптического колебания с четырьмя пучностями и четырьмя узлами, располагающимися вдоль окружности по ободку.
ЧЭ возбуждается таким образом, чтобы поддерживать первый основной резонансный режим (первая основная резонансная мода), и использовать второй основной резонансный режим для распознавания вращений. На рисунке 2.6 показан принцип работы гироскопа. В приложении В приведен внешний вид гироскопа INL-CVG-G200 и его чувствительных элементов.
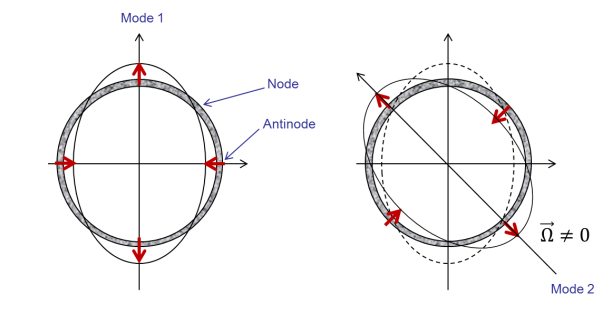
Рисунок 2.6 – принцип работы чувствительного элемента.
Замкнутый контур используется для приведения второго основного резонансного режима к нулю, и сила, необходимая для гашения данного режима, пропорциональна скорости входного вращения. Соответствующая замкнутая система автоматического регулирования называется компенсационной [2,3].
На рисунке 2.7 изображена ориентация выходов гироскопа. Если смотреть на каждый ЧЭ сверху, вращение против часовой стрелки будет давать положительный выход: PO1 > 0 или P02 > 0. Соответственно, NO1 и NO2 будет иметь отрицательное значение, и равняться по модулю соответственно PO1 и PO2.
Рисунок 2.7 – ориентация выводов гироскопа.