

Отрицательная гибкая обратная связь
В качестве параллельной функции выбираем
![]()
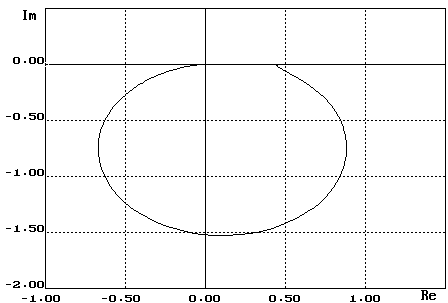
Таблица для построения годографа Найквиста.
Re |
0 |
-0,03 |
0 |
0,11 |
0,17 |
0,25 |
0,28 |
0,3 |
0,31 |
Im |
0 |
-0,054 |
-0,129 |
-0,188 |
-0,179 |
-0,138 |
-0,098 |
-0,045 |
0 |
t |
1 |
2,02 |
2,67 |
1,32 |
h(t) |
0 |
-2,41 |
-20 |
0,075 |
Как видно из годографа Найквиста система имеет запас устойчивости по модулю равный единице и запас устойчивости по фазе равный 43 о.
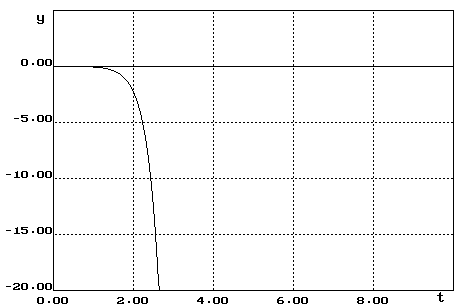
Определение основных показателей качества по кривой переходного процесса.
Данная система является в динамике неустойчивой, так как её переходная характеристика уходит в бесконечность.
Вывод: Данная коррекция улучшила статику системы (запас устойчивости по модулю повысился с 0,76 до 1), а динамике системы не изменилась.
Выводы:
В начале курсового проекта была получена система автоматического регулирования, которая удовлетворяла требуемым показателям качества в динамике, но была не работоспособной в статике и динамики. Для приведения системы в работоспособное состояние мною были предприняты две коррекции (последовательная и параллельная). Последовательная коррекция улучшила поведение системы в статике (уменьшив статизм системы до 0%), и улучшила динамику системы. Параллельная же коррекция ухудшила динамику и статику системы. Таким образом, можно сделать вывод, что для данной системы больше подходит последовательная коррекция. Так как при такой коррекции поведение системы в статике и динамике является оптимальным.
Список использованной литературы:
С. И. Суркова, А.Р. Хабаров «Исследование систем автоматического регулирования», Методические указания, Тверь, ТГТУ, 2003г.
Юревич Е.И. «Теория автоматического управления», Ленинград Энергия, 1975г.