

Раздел №2 Синтез системы автоматического регулирования.
Последовательная коррекция
При последовательной коррекции корректирующее звено включают в прямую цепь регулирования. Схема последовательной коррекции имеет вид:

При выборе последовательного корректирующего звена необходимо помнить, что дифференцирующие звенья увеличивают запас устойчивости системы и увеличивают ее быстродействие, интегрирующие – улучшают статику системы, но уменьшают запас устойчивости системы, безинерционные – уменьшают статическую ошибку системы (и, если К>1 и уменьшают при этом запас устойчивости системы).
В данном случае, мне необходимо уменьшить статическую ошибку. При этом величина максимального перерегулирования не должна превысить 25%, колебательность должна быть больше 75%, а время регулирования не должно превышать 60с. Из этих соображений я выбираю безинерционное звено, тогда Wисх. (р) и Wпосл. (р) будут иметь вид:

Заменим Wисх. (р) и Wпосл. (р) на эквивалентную функцию Wск. (р)
![]()
Рассмотрим влияние этого звена на статику системы:
![]() ;
;
![]()
То есть введение безинерционного звена в прямую цепь регулирования уменьшает статическую ошибку до 0%.
Влияние безинерционного звена на динамику рассмотрим с помощью АФЧХ скорректированной системы:
Таблица для построения годографа Найквиста.
Re |
0 |
-0,06 |
-0,1 |
-0,25 |
-0,32 |
-0,32 |
0,002 |
-0,19 |
-0,41 |
0 |
Im |
∞ |
-0,5 |
-0,27 |
-0,25 |
-0,21 |
0,15 |
0,016 |
0,19 |
0 |
0.04 |
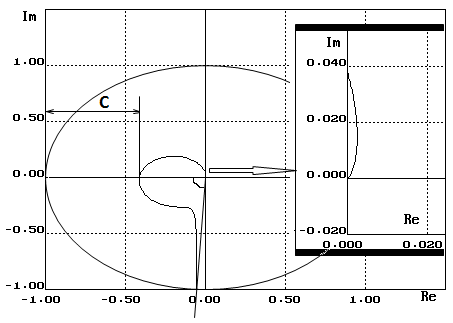
Как видно из годографа Найквиста система имеет запас устойчивости по модулю равный 0.69 и запас устойчивости по фазе равный 86о.
Теперь по передаточной функции замкнутой системы построим кривую переходного процесса (на ЭВМ)
Передаточная функция замкнутой системы:
![]()
Построим для данной передаточной функции кривую переходного процесса по точкам, полученным из расчета на ЭВМ.
Таблица экспериментальных данных.
h(t) |
0,00 |
0,55 |
0,55 |
0,8 |
0,8 |
0,91 |
0,91 |
0,95 |
0,98 |
1,01 |
1,00 |
t |
1,5 |
14,7 |
20,4 |
30 |
40 |
46 |
55,5 |
68,4 |
76,88 |
90 |
95 |

Определение основных показателей качества по кривой переходного процесса.
1) Максимальное динамическое отклонение.
![]()
2) Время Регулирования
![]()
3) Величина максимального перерегулирования.
![]()
4) Колебательность процесса.

Вывод.
Применяя
последовательную коррекцию к данной
системе автоматического регулирования,
и взяв в качестве корректирующего
безинерционное звено, равное
![]() ,
удалось уменьшить статическую ошибку
до 0 (улучшить статику), увеличить запас
устойчивости по фазе до 86о
(улудшилась
динамика). Теперь система отвечает
требуемым показателям качества, т.к.
величина максимального перерегулирования
составляет 1%, колебательность процесса
равна 100% и время максимального
перерегулирования не превышает 60с.
Данная система является в статике
работоспособной и отвечает основным
критериям в динамике.
,
удалось уменьшить статическую ошибку
до 0 (улучшить статику), увеличить запас
устойчивости по фазе до 86о
(улудшилась
динамика). Теперь система отвечает
требуемым показателям качества, т.к.
величина максимального перерегулирования
составляет 1%, колебательность процесса
равна 100% и время максимального
перерегулирования не превышает 60с.
Данная система является в статике
работоспособной и отвечает основным
критериям в динамике.