

15.Аналитическое определение кинематических характеристик.
Для аналитического определения пути, скорости и ускорения рабочего органа остановим кривошип, движущийся из точки 1 по часовой стрелке в произвольной точке В, рис. 7.3.
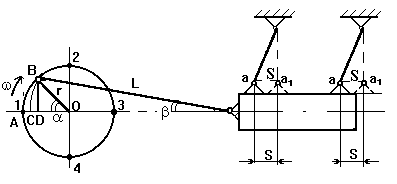
Рис. 7.3. Схема для определения кинематических характеристик колеблющегося рабочего органа при кривошипно-шатунном приводе.
Путь, пройденный ситом S из точки а в точку а1 выразим через угол поворота кривошипа a и его длину r.
Для современных сепараторов r/L £ 0,02, тогда ряд Тейлора преобразуется в следующую цифровую цепочку.
Следовательно, с достаточной точностью можно записать сито движется по гармоническому закону.
Из выражения следует, что дифференцируя по t получим выражение для определения скорости сита, υа в любой момент времени.
Ускорение сита, а можно найти, взяв вторую производную из выражения.
Для сообщения кузову колебательного движения необходима мощность, которую можно найти, пренебрегая массой шатуна (поскольку она в десятки раз меньше массы кузова).
На рис. 7.4. представлены диаграммы изменения пути S, скорости uа, ускорения а, силы инерции Ри и мощности N колеблющегося рабочего органа.
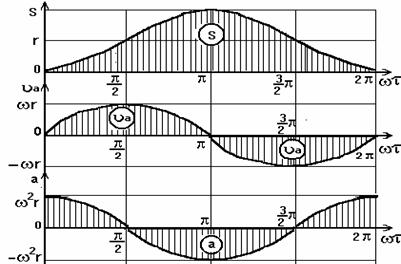
Рис. 7.4. Диаграммы изменения кинематических параметров колеблющегося органа
К полученным результатам следует сделать 2 замечания:
1) в условиях применения кривошипно-шатунного привода амплитуда колебаний не зависит от частоты колебаний и жесткости подвесок;
2) при теоретических исследованиях сделаны следующие допущения:
L>>r;
дуга а-а1 - прямая;
система абсолютно жесткая.
16.Задачи геометрического анализа механизмов.
Задачи геометрического анализа
Целью геометрического анализа является определение функций положения ме-
ханизма - зависимостей выходных координат x1, x2 ,..., xm , характеризующих положе-
ния его звеньев, от заданных входных координат q1, q2 ,..., qn . Для механизмов с n
степенями подвижности эти функции записываются в форме
xs = Πs (q1, q2 ,..., qn ) , s =1,2,...,m. (1)
Определение этих зависимостей составляет прямую задачу геометрического
анализа. При заданных законах изменения входных координат qk (t) (k =1,2,...,n) мож-
но, решив прямую задачу, найти законы изменения выходных координат, как функций
времени
xs (t) = Πs [q1(t), q2 (t),..., qn (t)], s =1,2,...,m. (2)
Для механизма с одной степенью подвижности функции положения являются
функциями одной независимой переменной q :
xs = Πs (q) , s =1,2,...,m. (3)
Исследование функций положения механизма, также проводимое в ходе геомет-
рического анализа, позволяет оценить его функциональные возможности.
В механизмах с несколькими степенями подвижности приходится решать об-
ратную задачу геометрического анализа, связанную с определением входных коорди-
нат q1, q2 ,..., qn по заданным значениям некоторых выходных координат x1, x2 ,..., xm .
В общем случае речь идет об определении функций
qk = Φk (x1, x2 ,..., xm ) , k =1,2,..., n . (4)
17.Задачи кинематического синтеза механизмов, ограничения.
Часто ставится обратная задача по кинематической схеме необходимой определить размеры звеньев.
При некоторые механизмы должны удовлетворять условия связывающих научным механизмом, технологическими и эксплуатационными методами.
Эти условия деляться на основные и дополнительные.
Основные условия записываются в виде функции независимыми параметрами назывывается целевой функцией.
Все остальные условия относятся к дополнительным и записываются в виде математической форме в виде ограничений.
1-ое ограничение
Ограничение на длины звеньев L1,L2,L3,…. в математической форме записывается неравенство L0<L1<L2
2-ое ограничение
Кривошипнокаромыслового механизма должно выполняться условие существующего кривошипа который является наименьшим звеном L1+L4<L2+L3
3-ое ограничение
Угол давления в кинематической паре образован шатуном и выходным звеном не должно быть больше допустимого значения Vi<=Vдоп
Угол давления- это угол между вектором скорости и вектором силы.
4-ое ограничение
Ограничение на массу и моменты инерции звеньев