

7.Кинематические характеристики механизмов.
Виды кинематических характеристик:
1)координата перемещения траектории точек и звеньев
2)скорости и ускорения точек звеньев + не зависит от закона движения звена
3)функции положения
4)аналоги скоростей и ускорений
8.Способ засечек.
В ТММ используется графический и аналитические методы исчисления.
Графические методы не прывышают 0,3…0,5%
Метод планов – условно изображается в масштабе.
Основные методы:
а)перемещение и траекторий точек исчисления- план положения
б)скорость точек и механизмов- план скоростей
в)ускорение точек и механизмов- план ускорений
9.Способ ложных положений.
ЛОЖНОГО ПОЛОЖЕНИЯ ПРАВИЛО — один из классических способов приближенного вычисления корней уравнения f (х)=0 — алгебраического или трансцендентного. Сущность ложного положения правила сводится к следующему. Рассматривают два значения а и b аргумента функции действительного переменного f (х) (х — действительное), близких к простому корню х этой функции (два ложных положения), таких, что функция в этих точках х=а и х=b принимает разные по знаку значения (рис. 140); f(а)< 0, f(b) > 0.
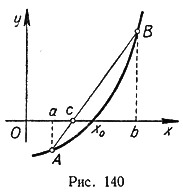
При этом предполагается, что в окрестности точки х=х0 функция f(x) вместе с f' (x) и f" (х) непрерывна, и f'(x) и f" (х) в окрестности точки не меняют знака. На отрезке [a, b] функцию f(x) заменяют линейной функцией (график кривой у=f(х) заменяют хордой АВ). Получают новое приближенное значение х=с корня уравнения, более близкое к истинному значению корня х= х0, чем приближенное значение х=а. При этом выполняется равенство:

Применив второй раз ложного положения правило на участке [с, b] и заменив функцию f(x) иа [с, b] линейной функцией (кривую у=f (х) хордой А1В), получим новое приближенное значение корня х=с1, более близкое к истинному значению корня х=x0 уравнения, чем х=с, и т. д. Таким образом, ложного положения правило дает возможность вычислить корень уравнения f (х)=0 с любой степенью точности. Ложного положения правило часто используют в комбинации с другими методами (см. Ньютона метод, Метод касательных). Ложного положения правило иначе называется методом секущих, методом хорд или методом (правилом) линейного интерполирования. Ложного положения правило называют также методом решения задач в арифметике на предположение (метод ложного положения).
10.План скоростей, свойства, применение.
План скоростей- чертёж с изображённым вектором равных по модулю и направленная скорость точек и звеньев механизма в данный момент.
Свойства:
1)каждая фигура на плане механизма имеет себе подобную на плане скоростей
2)все абсолютные скорости выходят из полюса плана скоростей
3)при помощи плана скоростей можно определить скорости всех точек, всех звеньев по величине и направлению