

31.Виды кулачковых механизмов, выбор.
Кулачко́вый механи́зм — механизм, образующий высшую кинематическую пару, имеющий подвижное звено, совершающее вращательное движение, — кулак (кулачок), с поверхностью переменной кривизны или имеющей форму эксцентрика, взаимодействующей с другим подвижным звеном — толкателем, если подвижное звено совершает прямолинейное движение, или коромыслом, если подвижное звено совершает качание. Кулак, совершающий прямолинейное движение, называется копиром.
Виды кулачковых механизмов
1)плоский кулачок с коромыслом
2) плоский кулачок со смещённым толкателем с роликом
3)поступательно движущийся кулачок с игольчатым толкателем
4)пространственный (цилиндрический) кулачок с толкателем с роликом
5)пространственный (цилиндрический) кулачок с коромыслом с роликом
6)угол давления и фазовые углы плоского кулачка
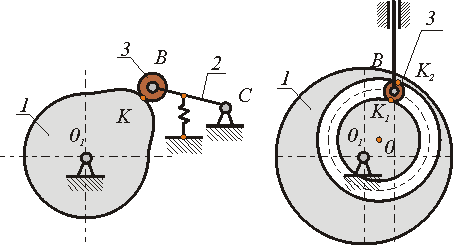
Плоский кулачок с коромыслом
При силовом замыкании удаление толкателя осуществляется воздействием контактной поверхности кулачка на толкатель (ведущее звено - кулачок, ведомое - толкатель). Движение толкателя при сближении осуществляется за счет силы упругости пружины или силы веса толкателя, при этом кулачок не является ведущим звеном. При геометрическом замыкании движение толкателя при удалении осуществляется воздействием наружной рабочей поверхности кулачка на толкатель, при сближении - воздействием внутренней рабочей поверхности кулачка на толкатель. На обеих фазах движения кулачок ведущее звено, толкатель - ведомое.
Кулачковый механизм с силовым Кулачковый механизм с геометрическим
замыканием высшей пары замыканием высшей пары
32.Законы движения км, выбор.
Есть 3 вида законов:
1)обусловлен появлению жёстких ударов
2) обусловлен появлению мягких ударов
3)безударные
33.Основные размеры км с толкателем.
При работе КМ не должно происходить заклинивание и должен обеспечить высокий КПД.
КПД КМ уменьшится с увеличением угла давления.
Угол давления- это угол между нормалью к профилю кулачка и скорости толкателя.
34. Основные размеры км с коромыслом.

Рис. 6.1. Исследуемый кулачковый механизм
6.1. Структурный анализ кулачкового механизма с коромыслом и роликом.
Из
принципа действия механизма следует,
что кулачок, ролик и коромысло совершают
вращательное движение
![]() соответственно в опорах A, C и D.
соответственно в опорах A, C и D.
Точка контакта элементов кинематической пары B совершает сложное движение, которое можно разложить на два простейших вдоль оси X и Y. Следовательно, высшая кинематическая пара B является двухподвижной.
Исследуемый механизм имеет три (n=3) подвижных звена, три одноподвижные пары (P1=3) и одну двухподвижную (P2=1) кинематические пары. Он существует в трехмерном (М=3) трехподвижном (П=3) пространстве.
Подвижность кулачкового механизма с коромыслом и роликом в соответствии с формулой Чебышева определится:
W=3*3-2*3-1=2