

3.4.3. Параллельное включение реакторов и активных сопротивлений в цепь ротора
Как влияет на вид механической характеристики асинхронного двигателя параллельное включение активного сопротивления и реактора в цепь ротора?
В первый момент пуска асинхронного двигателя частота тока в роторе и реакторе велика. Поэтому основная часть тока ротора идет через активное сопротивление rдоб2, рис.16. Это сопротивление, в основном, и определяет величины пусковых тока и момента двигателя. По мере увеличения скорости и уменьшении частоты тока в роторе, индуктивное сопротивление реактора уменьшается, и через реактор начинает протекать все большая часть тока ротора. При скорости ротора близкой к номинальной частота тока в обмотке ротора примерно равна 1..2 Гц, тогда индуктивное сопротивление реактора будет незначительным, и почти весь ток будет протекать через реактор. Благодаря изменению параметров роторной цепи при пуске

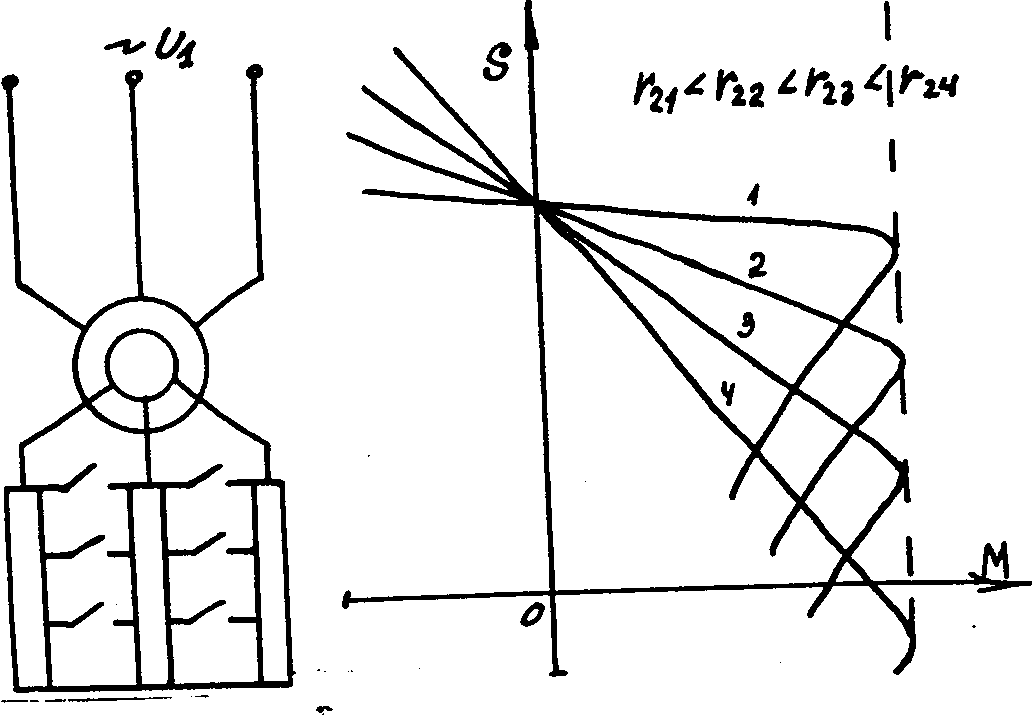

r21<r22<r23<r24 Рис.14. Механические характеристики асинхронной машины при изменении активного сопротивления в цепи ротора.
Расчет ступеней добавочных сопротивлений для пусковой диаграммы асинхронного двигателя осуществляется графическими или аналитическими методами [5, 6].
3.4.2. Последовательное включение реакторов и добавочных активных сопротивлений в цепь ротора
Реакторы позволяют получить плавное ускорение привода при малом количестве ступеней ускорения, играют роль автоматического регулятора тока в роторе и обеспечивают постоянство момента двигателя в процессе пуска.
Пусть активное пусковое сопротивление r’доб2 и реактор с индуктивным сопротивлением x’доб2 соединены последовательно и включены в каждую фазу обмотки ротора рис.15. В начальный момент пуска асинхронного двигателя, когда частота тока в обмотке ротора равна частоте сети, индуктивное сопротивление реактора велико и оно ограничивает величину пускового тока. По мере разгона двигателя ЭДС ротора E2S=E2S уменьшается, но
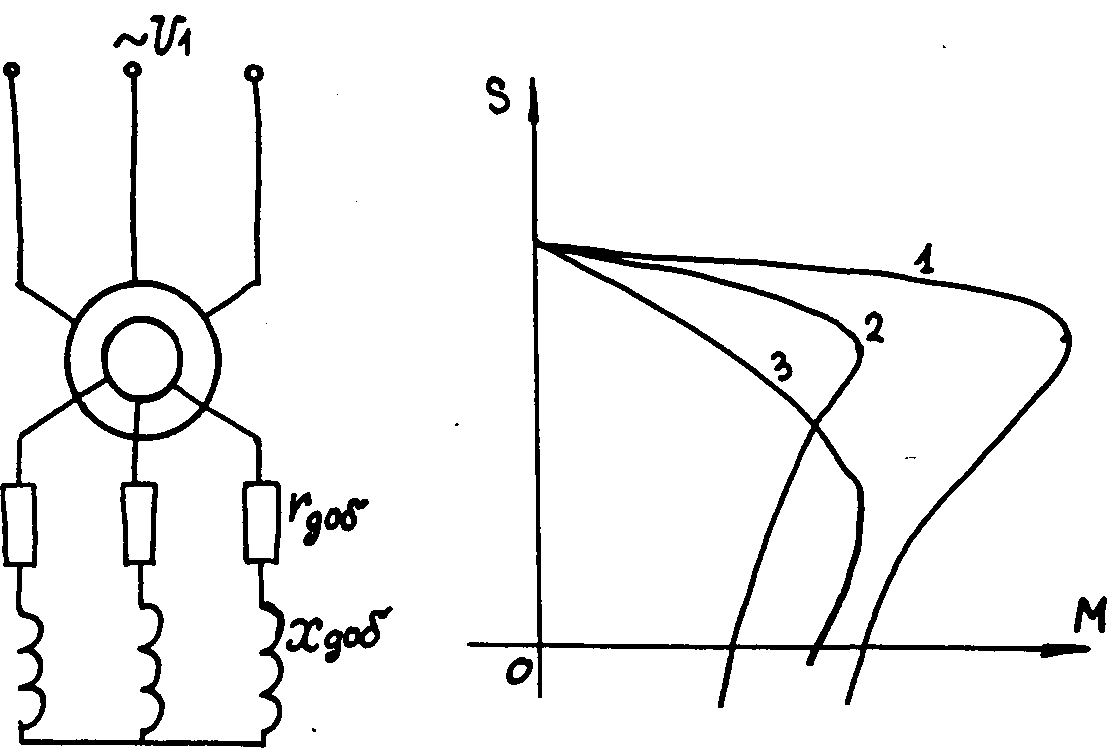



Рис.15. Механические характеристики асинхронного двигателя.
1 - естественная. 2 - при включении в цепь ротора добавочного индуктивного сопротивления. 3 -
C другой стороны, если бы удалось вращающуюся асинхронную машину заменить на эквивалентную ей по энергетическим и электромагнитным соотношениям машиной с неподвижным ротором, то для исследования асинхронной машины можно было бы применить теорию трансформаторов.
Решение такой задачи возможно, поскольку, как было установлено в параграфе 1.3. при вращении ротора МДС и магнитные поля статора и ротора, вращаются с одинаковой угловой скоростью ω1 и образуют результирующее вращающееся магнитное поле. Но одного этого условия еще недостаточно для приведения режима работы вращающейся асинхронной машины и эквивалентному режиму неподвижной машины. Для этого необходимо, чтобы остались неизменными величины токов обмоток и их фазовые сдвиги относительно друг друга. В этом случае остаются неизменными величины результирующих МДС и магнитных потоков, а также величины потребляемой из сети мощности и электромагнитной мощности, передаваемой через зазор с помощью магнитного поля от статора в ротор. Кроме того, при переходе к неподвижной машине механическая мощность должна быть представлена равной ей электрической мощностью.
На основании второго закона Кирхгофа составим уравнения напряжений для фазы обмоток ротора и статора
![]()

![]() (21)
(21)
где U1 - фазное напряжение источника питания (сети);
I1; I2; r1; r2 – токи и активные сопротивления фаз обмоток статора и ротора;
Е1; Е2S – действующие значения ЭДС (11) и (15), наводимых основным магнитным потоком Ф;
Е1σ; E2σ - действующие значения ЭДС, наводимых потоками рассеяния.
ЭДС рассеяния обмоток статора и ротора можно выразить следующим образом
![]()
 (22)
(22)
г де x1; x2S - индуктивные сопротивления рассеяния фаз статора и вращающегося ротора, которые равны
![]() ,
(23)
,
(23)
x2 - индуктивное сопротивление рассеяния неподвижного ротора;
где L1, L2 - индуктивности фаз обмоток статора и ротора от потоков рассеяния Ф1σ и Ф2σ. Так как потоки рассеяния обмоток замыкаются, в основном, по воздуху, то будем считать индуктивности L1 и L2 величинами постоянными.
С учетом выражений для ЭДС рассеяния (22) систему уравнений напряжений (21) представим в виде
![]()
 (24)
(24)
Из второго уравнения системы напряжений найдем ток фазы обмотки ротора
![]() ,
(25)
,
(25)
Этому уравнению соответствует схема замещения вращающегося ротора

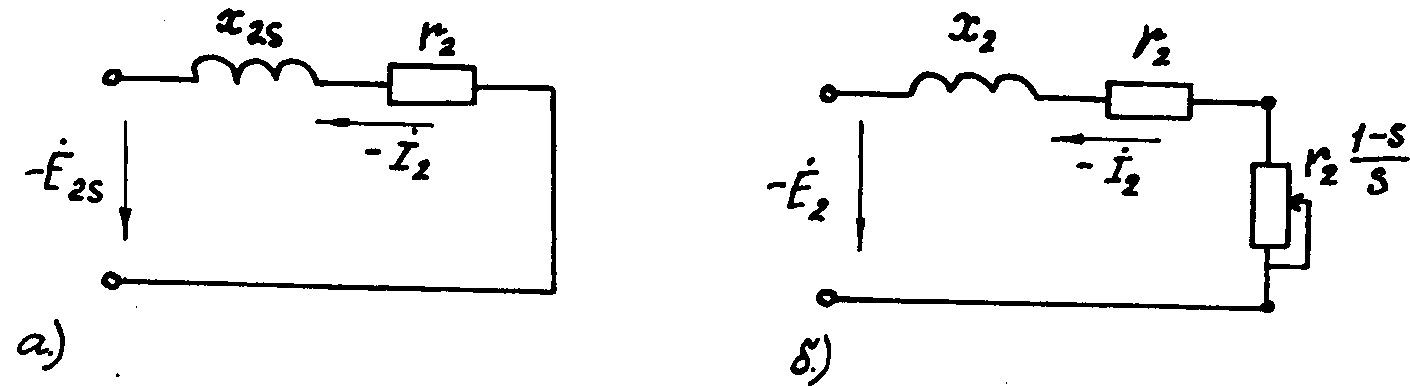
рис. 2а.
Рис.2. Схемы замещения вращающегося (а) и неподвижного (б) ротора
асинхронного двигателя.
Преобразуем выражение для тока ротора (25). Для этого разделим числитель и знаменатель на скольжение S, получим выражение для тока I2 в виде
 ,
(26)
,
(26)
Новому выражению для тока I2 соответствует схема замещений рис.2б. В этой схеме замещения (по сравнению со схемой рис.2а) на зажимах вместо ЭДС вращения ротора Е2S=SE2 с частотой f2=Sf1 действует ЭДС при неподвижном роторе Е2 с частотой f1. Соответственно, вместо индуктивного сопротивления x2S=Sx2 и активного сопротивления r2 вращающегося ротора имеют место индуктивное сопротивление x2 и активное сопротивление r2/S неподвижного ротора. Активное сопротивление r2/S можно представить в виде суммы двух сопротивлений r2/S=r2+r2(1-S)/S. Введение добавочного сопротивления r2(1-S)/S в схему замещения не оказывает влияния на фазу тока ротора I2 относительно ЭДC Е2. Действительно, из схем замещения рис.2 имеем
tgψ2=x2S/r2=Sx2/r2=x2/(r2/S), (27)
Очевидно, что при переходе от схемы замещения асинхронной машины при вращающемся роторе рис.2а к схеме замещения при неподвижном роторе рис.2б токи статора I1 и ротора I2 остаются неизменными по величине и по фазе, следовательно, не изменятся величина потребляемой из сети мощности P1 (1), электромагнитная мощность РЭМ (2), механическая мощность РМЕХ (3).
P1 = m1U1I1cosφ1;
PЭМ = P1 - ΔPЭ1 - ΔPM1;
PМЕХ = PЭМ - ΔPЭ2 = P1 - ΔPЭ1 - ΔPЭ2ΔPM1.
Так как в эквивалентном режиме при неподвижном роторе потери в статоре и роторе остаются такими же, как во вращающейся асинхронной машине, то мощность, потребляемая в добавочном сопротивлении r2(1-S)/S, равна полной механической мощности PМЕХ, развиваемой асинхронной машиной при вращении
![]() ,
(28)
,
(28)
1.5. Т-образная и Г-образная схемы замещения асинхронной машины
Как уже отмечалось, в неподвижном асинхронном двигателе электромагнитные процессы протекают, в основном так же, как в трансформаторе. В таком случае для анализа электромагнитных процессов в эквивалентной асинхронной машине с неподвижным ротором может быть использована Т-образная схема замещения трансформатора.
При составлении схемы замещения асинхронной машины рис.3 также, как в теории трансформаторов, обмотка ротора с числом фаз m2 и числом витков в фазе w2, заменяется приведенной обмоткой, имеющей число фаз m1 и число витков фазы w1, как у обмотки статора.
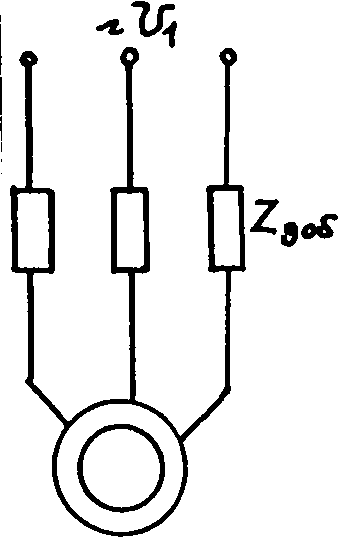

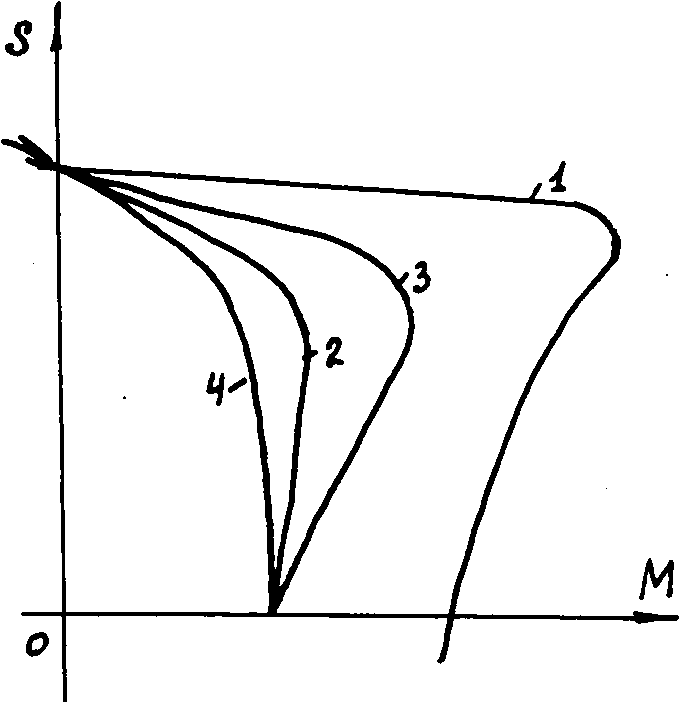

Рис.13. Влияние на механические характеристики асинхронного двигателя добавочного сопротивления, включенного в цепь статора. 1 - естественная характеристика; 2 - Zдоб=rдоб; 3 - Zдоб=xдоб; 4 – U1<U1НОМ