

Поляризованные электромагниты постоянного тока характеризуется наличием двух независимых магнитных потоков поляризующего и рабочего.
Поляризующий поток Фп создается с помощью постоянных магнитов. Рабочий поток Фр создается рабочей отмоткой. При отсутствии в ней тока на якорь действует сила, создаваемая поляризующим потоком.
Действие поляризованного эл.магнита зависит как от величины, так и от направления рабочего потока, т.е. от направления тока рабочей обмотке.
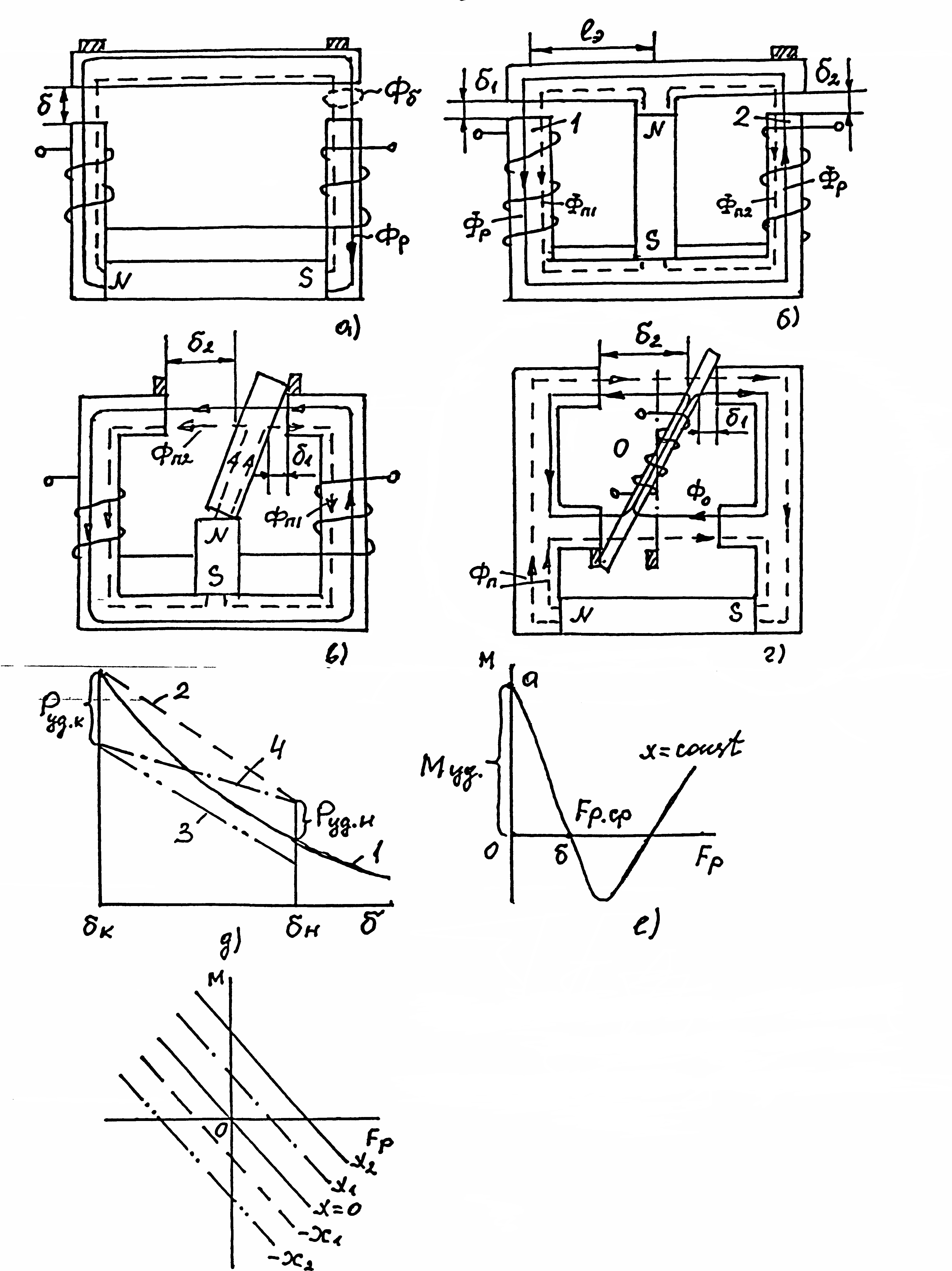
Магнитные системы поляризованных эл.магнитов могут быть с последовательной (рис.19,а), параллельной (рис.19,б,в) и мостовой (рис.19,г) магнитной цепью.
В последовательной
магнитной системе проходит единый поток
являющийся результатом совместного
действия мдс поляризующего и рабочего
источников
![]() .
.
Пренебрегаем потоками рассеяния и насыщением стали. Тогда
![]() .
.
Считаем поле в зазорах равномерным
![]()
Сила, действующая
на якорь, будет равна
![]() .
.
При отсутствии
тока в рабочей обмотке
 .
.
Зависимость P0=f(δ) представлена на рис.19,д – кривая 1. Там же показаны возможные характеристики возрастной пружины (2, 3, 4).
Если характеристика пружины соответствует характеристике 2, то при отсутствии тока в рабочей обмотке якорь всегда будет занимать положение с максимальным (начальным) рабочим зазором δН.
ж)
Рисунок 19. Магнитные системы и характеристики поляризованных электромагнитов.
Для срабатывания эл.магнита в этом случае мдс рабочей обмотки должна действовать согласно с мдс поляризующей обмотки.
При характеристики пружины, соответствующей прямой 3 будет иметь место преобладания к минимальному (конечному) зазору и якорь при отсутствии тока в рабочей обмотке всегда будет притянут к сердечнику. В этом случае эл.магнит срабатывает только при встречном действии мдс рабочей обмотки по отношению к мдс поляризующей обмотки.
Наконец, если характеристика пружины соответствует прямой 4, якорь может при отсутствии тока в рабочей обмотке занимать два положения. В зависимости от направления предыдущего действия мдс рабочей обмотки он может остаться или в положении с максимальным зазором (удерживающая сила Руд,н), или в притянутом положении (удерживающая сила Руд,к).
Наибольшее распространение, благодаря своим высоким энергетическим показателям и достаточной простоте конструкции, получили системы с параллельной магнитной цепью (рис.19,б,в).
Рассмотрим магнитную систему (рис.19,в). При отсутствии тока в рабочей обмотке на якорь действует результирующая сила
![]()
где ФП1 и ФП2 – потоки, создаваемые постоянным магнитом в рабочих зазорах δ1 и δ2.
Обозначим через
![]() плечо
приложения эл.магнитной силы, тогда
вращающий момент
плечо
приложения эл.магнитной силы, тогда
вращающий момент
![]() ,
,
где М0 – удерживающий момент Му, приживающий якорь к упору со стороны меньшего зазора.
ФП= ФП1+ ФП2 – суммарный магнитный поток от постоянного магнита
![]()
Подставим эти значения в уравнение моментов
![]() ,
,
где
![]() =
Х – полуразность магнитных зазоров
между якорем и полюсами, являющаяся
одним из параметров эл.механических
характеристик.
=
Х – полуразность магнитных зазоров
между якорем и полюсами, являющаяся
одним из параметров эл.механических
характеристик.
При
![]() якорь притягивается к полюсу 1 (влево),
якорь притягивается к полюсу 1 (влево),
![]() -
к полюсу 2 (вправо),
-
к полюсу 2 (вправо),
![]() ,
М0=0
,
М0=0
Значение Х можно менять, изменяя положение упора, условно показанного на рис.19,б.
Когда по рабочей обмотке протекает ток
![]()
В зазоре δ1 потоки складываются, а в δ2 – вычитаются, поэтому такие системы называют «дифференциальными».
Зависимость М=f(Fp) изображается в виде параболы с параметром Х (рис.19,е). Она характеризует два основных параметра поляризованного эл.магнита:
величину Муд=М0 (при Fp=0) – момент удерживающий якорь;
мдс срабатывания эл.магнита Fp.cp.
Между точками «а»
и «б» парабола близка к прямой. Для этой
области прямые показаны на рис.19,ж с
параметром
![]() .
.
Наиболее чувствительные поляризованные эл.магниты строятся на базе систем мостового типа (рис.19,г).
При симметричной настройке (рис.19,г – упоры расположены симметрично от линии «нейтрали») якорь может занимать только положения, соответствующие отклонениям Х и –Х. Коэффициент возврата Кв=1. При отсутствии тока в рабочей обмотке якорь может быть расположен у любого из упоров, и настройку называют двухпозиционной без преобладания.
При настройке с магнитным преобладанием (рис.19,г) якорь в обоих крайних положениях находится по одну сторону от нейтрали, и коэффициент возврата 0<Кв<1. Такая настройка называется двухпозиционной с преобладанием.
Если при отсутствии тока в обмотке якорь возвращается в среднее положение с помощью специальной пружины без предварительной затяжки, то Кв=1. Такая настройка носит название трехпозиционной.