

2.3. Динамический фактор автомобиля
После определения передаточных чисел трансмиссии можно приступить к вычислению динамических показателей и характеристик автомобиля.
Удобным измерителем динамических качеств автомобиля является динамический фактор, при помощи которого можно сравнивать тягово-скоростные свойства автомобилей различных типов.
Динамический фактор автомобиля – это отношение избыточной силы тяги к полному весу автомобиля, т.е.
![]() ,
(19)
,
(19)
или подставляя соответствующие значения:
![]() .
(20)
.
(20)
После несложных преобразований можно получить следующее выражение динамического фактора:
![]() .
.
По формуле (19) можно рассчитать динамическую характеристику автомобиля, которая графически изображает зависимость динамического фактора от скорости движения автомобиля на различных передачах (рис. 7).
Благодаря тому, что динамический фактор безразмерная величина – по динамической характеристике можно сравнивать между собой различные типы грузовых и легковых автомобилей.
С
помощью динамической характеристики
весьма просто решаются некоторые задачи
тяговой динамики. Например, при равномерном
движении, когда ускорение равно нулю,
динамический фактор равен коэффициенту
дорожного сопротивления
.
Поэтому по динамической характеристике
можно определить, с какой установившейся
скоростью автомобиль может двигаться
по дороге с тем или иным покрытием.
Автомобиль может двигаться по
горизонтальной дороге, если сопротивление
качению колес не превышает
![]() .
При коэффициенте сопротивления качению
колес равном
движение автомобиля возможно на первой
передаче со скоростью V1
(см. рис. 7).
.
При коэффициенте сопротивления качению
колес равном
движение автомобиля возможно на первой
передаче со скоростью V1
(см. рис. 7).
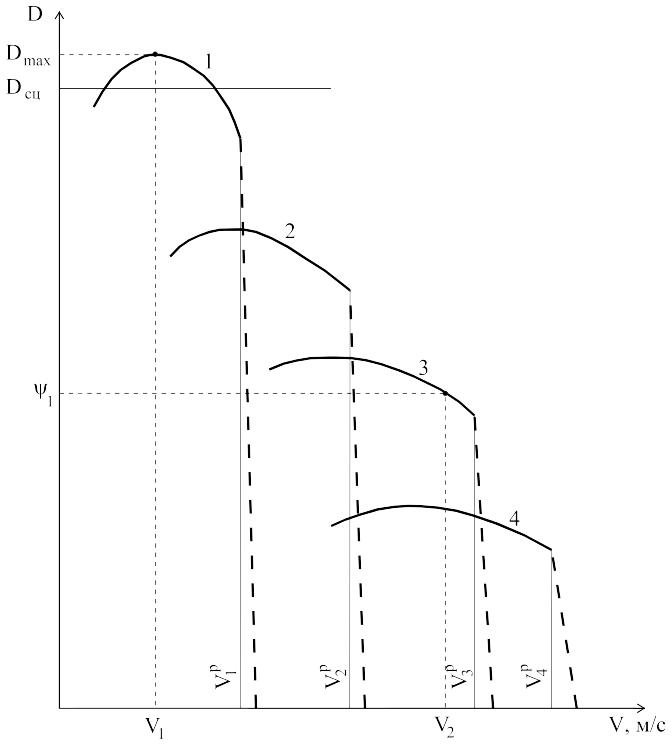
Рис. 7. Динамическая характеристика автомобиля (1-4 – передачи коробки передач)
По
динамической характеристике можно
определить также максимальную скорость
движения автомобиля по дороге с заданным
сопротивлением. Например, на рис. 7 видно,
что автомобиль может двигаться по дороге
с заданным сопротивлением
![]() на третьей передаче с максимальной
скоростью V2.
на третьей передаче с максимальной
скоростью V2.
Если
на двигатель установлен регулятор
максимальной частоты вращения коленчатого
вала двигателя, то кривые 1, 2, 3 и 4 на рис.
7 при скоростях
![]() ,
,
![]() ,
,
![]() и
и
![]() ,
переходят в пунктирные прямые,
соответствующие регуляторной ветви
скоростной характеристики, представленной
на рис. 3.
,
переходят в пунктирные прямые,
соответствующие регуляторной ветви
скоростной характеристики, представленной
на рис. 3.
В реальных условиях эксплуатации автомобиля возможен случай, когда нельзя реализовать динамический фактор, рассчитанный по формуле (19), из-за недостаточности сцепления ведущих колес с дорогой. Этот предельный случай оценивается динамическим фактором по сцеплению, который определяется по формуле:
![]() ,
,
где P – максимальная сила сцепления ведущих колес с дорогой.
При
буксовании ведущих колес скорость
автомобиля невелика. Следовательно,
значение силы сопротивления воздуха
близко к нулю. Изменением нормальных
реакций по осям можно также пренебречь.
Тогда значение динамического фактора
по сцеплению равно постоянной величине
![]() ,
изображенной на рис. 7 прямой, параллельной
оси абсцисс. Из сказанного следует, что
движение автомобиля без буксования
ведущих колес возможно при выполнении
условия
,
изображенной на рис. 7 прямой, параллельной
оси абсцисс. Из сказанного следует, что
движение автомобиля без буксования
ведущих колес возможно при выполнении
условия
![]() .
.