

5. Понижение порядка исходной системы
5.1. Определить возможность понижения порядка для исходной системы путем отбрасывания недоминирующих корней.
Корни характеристического уравнения:
 ,
,
 .
.
Упрощение невозможно, так как все корни влияют на систему
6. Синтез непрерывной системы с модальным регулятором.
6.1. Построить схему переменных состояний (СПС) для непрерывной системы второго порядка.



6.2. По СПС построить математическую модель, определить матрицы A, В
 , тогда
, тогда


6.3. Проверить управляемость системы.




 Система управляема
Система управляема
6.4. Рассчитать модальный регулятор.
 где
где




Чтобы
не было ошибки в установившемся режиме,
K=
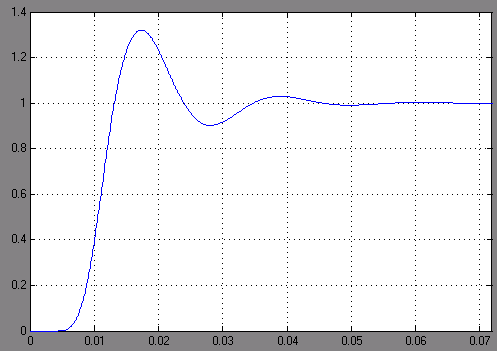
6.5. Промоделировать объект с регулятором на компьютере, определить показатели качества.


Показатели качества ГРАФИК №7.
Время переходного процесса 0.0332 с
Перерегулирование
Ошибка в установившемся режиме

7. Анализ исходной дискретной системы.
7.1. Сменить вид объекта: Промоделировать исходную замкнутую систему третьего порядка, поставив последовательно ключ и фиксатор в сигнал ошибки, преобразуя тем самым систему из непрерывной в дискретную.

7.2.
Получить приближенную ДПФ разомкнутой
системы
 при помощи подстановки Тастина
при помощи подстановки Тастина
 .
.


8. Синтез цифрового регулятора системы.
8.1. Рассчитать параметры цифрового регулятора по критерию быстродействия.
 ,
,




8.2. Промоделировать объект с регулятором на компьютере, определить показатели качества.

Показатели качества ГРАФИК №9.
1.Время переходного процесса 0.031 с
2.Перерегулирование
 = 32,01%
= 32,01%
3.Ошибка в установившемся режиме

Выводы
Выполнив данную курсовую работу мы провели анализ и синтез стационарной системы. В результате чего для различных вариантов синтеза получили различные показатели качества, которые представлены в таблице.
Показатели качества различных вариантов синтеза
Метод синтеза |
Показатели качества |
||
tпп, с |
σ,% |
e(∞), % |
|
Желаемые показатели качества |
0,0055 |
30 |
10 |
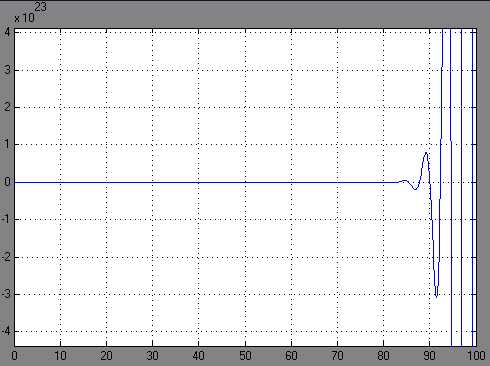
Исходная система |
Система неустойчива |
||
Регулятор по критерию ИВМО |
19.75 |
62.8 |
0 |
Регулятор ИВМО с предшествующим фильтром |
13,956 |
6 |
0 |
Регулятор СО |
15.72 |
41 |
0 |
Регулятор СО с предшествующим фильтром |
18.20 |
8 |
0 |
ЛАЧХ |
0,00893 |
0 |
0 |
Модальный регулятор |
0,0332 |
0 |
0 |
Цифровой регулятор |
0,031 |
32,01 |
0 |
Синтез непрерывной системы методом ЛАЧХ и модальным регулятором удовлетворяет желаемым показателям качества.
Список литературы
1. Конспект лекций по ТАУ (1-ая и 2-ая часть).
2. Методические указания по ТАУ к курсовой работе: Пермь, 2007.
3. Теория систем автоматического регулирования: Издание третье исправленное. Бесекерский В. А., Попов Е. П., М., 1975.
4. Теория автоматического управления: Учебник для вузов С. Е. Душин, Н. С. Зотов, Д. Х. Имаев и др.; под ред. В. Б. Яковлева. – М.: Высшая школа, 2003.
5. Теория автоматического управления: Учебное пособие М. М. Савин, В. С. Елсуков, О. Н. Пятина; под ред. В. И. Лачина. – Р-н-Д.: Феникс, 2007.