

Министерство образования и науки Российской Федерации
Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
«Пермский национальный исследовательский политехнический университет»
Кафедра микропроцессорных средств автоматизации
Курсовая работа
по дисциплине: Теория автоматического управления. Тема: «Анализ и синтез стационарных систем».
|
|
|
Выполнил студент гр. АУЦ-11з
Ульянов В.П (Фамилия И.О.) 11з-050 (номер зачетной книжки) 26.04.14 (дата, подпись)
Проверил: преподаватель (должность) Билоус О.А (Фамилия И.О) _________________________________ (оценка) _________________________________ (дата, подпись)
|
Пермь 2014
Содержание
1. Анализ исходной непрерывной системы. 2
2. Синтез непрерывной системы по критерию интеграла от взвешенного модуля ошибки 3
3. Синтез непрерывной системы по критерию модульного или симметричного оптимума 7
4. Синтез непрерывной системы методом ЛАЧХ. 11
5. Понижение порядка исходной системы 13
6. Синтез непрерывной системы с модальным регулятором. 13
7. Анализ исходной дискретной системы. 16
8. Синтез цифрового регулятора системы. 17
Выводы 19
Список литературы 19
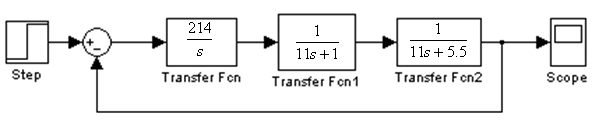
Дан объект - замкнутая одноконтурная система автоматического управления.
Передаточная
функция разомкнутой части объекта -
 ,
где
,
где
 ;
;  2(5+0)+1=11;
2(5+0)+1=11;
 ;
;
 214
214
Желаемые показатели качества


1. Анализ исходной непрерывной системы.
1.1. Передаточная функция разомкнутой системы

Передаточная
функция замкнутой системы

1.2. Проверим устойчивость системы методом Гурвица



4) Критерий
Гурвица
 >
0
>
0


система
неустойчива, т.к.
 >
0,
>
0,
 >
0,
>
0,
 <
0
<
0
1.3. Промоделировать исходную замкнутую непрерывную систему третьего порядка (объект) на компьютере – получить график переходного процесса.

1.4. Показатели качества
Так как система неустойчива, то и показатели качества не определить
Так как система неустойчива, то
 0,055с
0,055с
2. Синтез непрерывной системы по критерию интеграла от взвешенного модуля ошибки
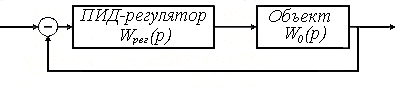
2.1.
Передаточная функция замкнутой системы
с ПИД-регулятором




2.2. Оптимальные значения коэффициентов характеристического полинома замкнутой системы
 121
121

 =>
=>


Определим передаточную функцию замкнутого контура


2.3. Промоделировать объект с регулятором на компьютере, определить показатели качества системы с регулятором.
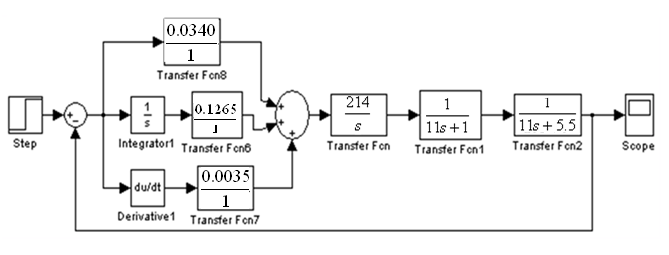

Показатели качества
Время переходного процесса
 19,75
c
19,75
cПеререгулирование


Ошибка в установившемся режиме

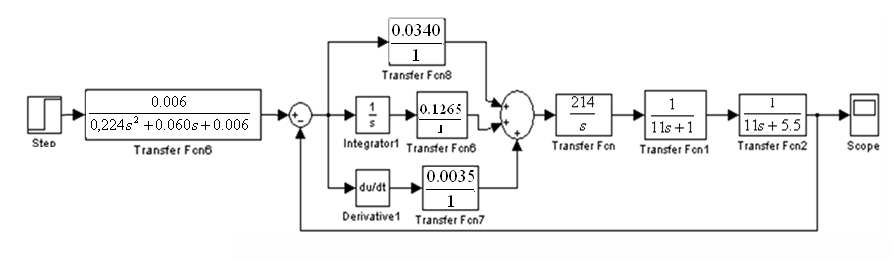
2.4. Рассчитать параметры предшествующего фильтра.

Определяем передаточную функцию предшествующего фильтра, так, чтобы передаточная функция замкнутой системы не имела нулей







Определяем передаточную функцию предшествующего фильтра, так, чтобы передаточная функция замкнутой системы не имела нулей и приняла табличный вид


Определим передаточную функцию замкнутого контура

2.5. Промоделировать объект с регулятором и предшествующим фильтром на компьютере, определить показатели качества системы с регулятором и фильтром.
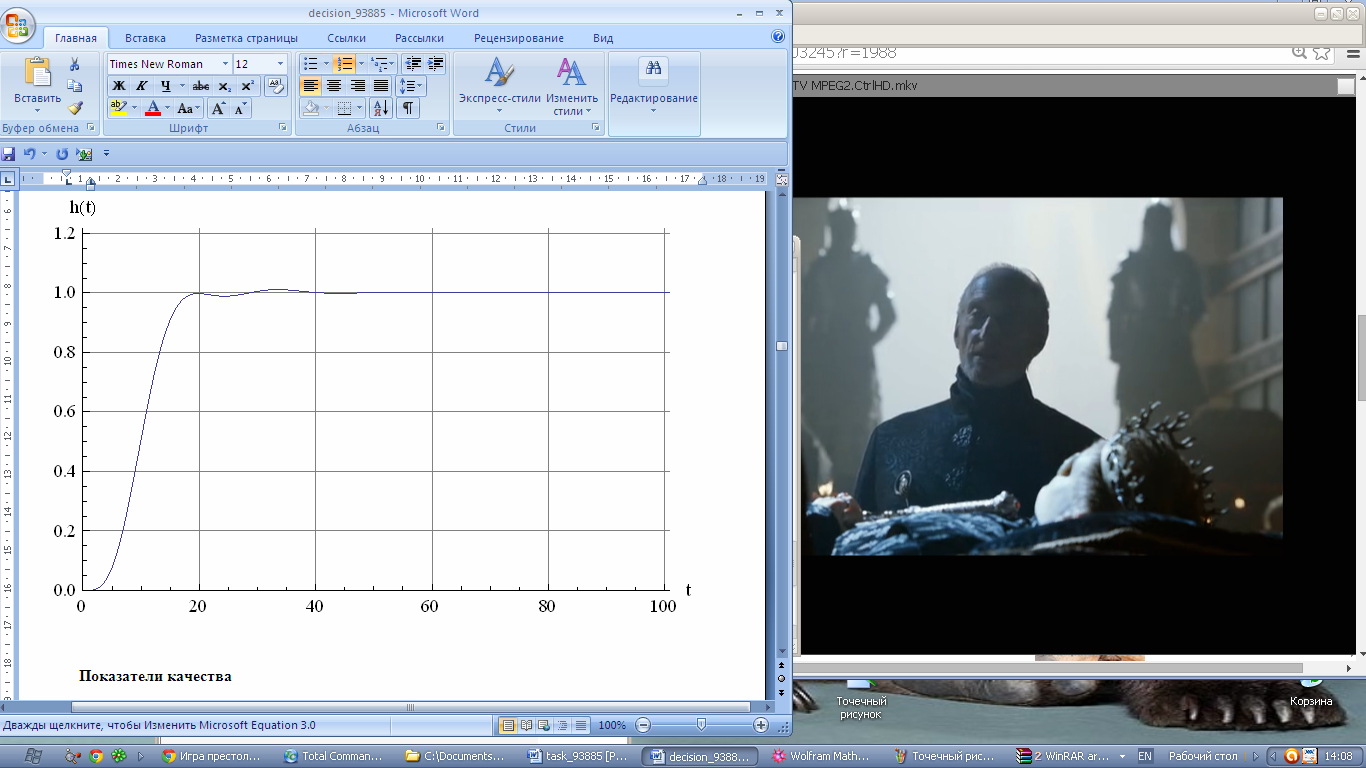
Показатели качества
Время переходного процесса 13,956 c
Перерегулирование

Ошибка в установившемся режиме