

Контрольная работа
Контрольная работа состоит из трех задач, соответствующих изучаемым разделам курса. Варианты заданий соответствуют порядковому номеру студента в списке группы. Количество задач определяет преподаватель, ведущий дисциплину.
При оформлении контрольных работ необходимо придерживаться следующих рекомендаций.
1. Контрольная работа выполняется на стандартных листах формата А4 или в тетради.
2. Обложка оформляется в соответствии с образцом, приведенным в приложении.
3. Текст пишется от руки или с применением каких-либо технических средств.
4. В тексте записки недопустимы сокращения слов, кроме общепринятых (САУ, ТАУ и т. п.). При необходимости сокращения какого-либо наименования приводится соответствующее пояснение. Например: метод аналитического конструирования оптимальных регуляторов (АКОР).
5. Рисунки и графики включаются в записку по ходу текста.
6. Расчеты характеристик сводятся в таблицы.
7. Страницы, рисунки и таблицы должны быть пронумерованы.
8. Все действия должны сопровождаться соответствующими пояснениями.
9. Формулы вначале преобразуются в буквенном виде и только потом подставляются численные значения параметров и записывается конечный результат. Все обозначения в формулах следует расшифровать.
10. Список литературы приводится в конце расчетно-пояснительной записки.
Для каждого литературного источника указывается: фамилия И.О. автора, полное наименование, издательство, год издания и количество страниц.
На проверку контрольная работа представляется в сшитом виде. Зачет проводится устно в процессе собеседования с преподавателем.
Задача № 1
Задание: Для линейной импульсной САУ с экстраполятором нулевого порядка, заданной структурной схемой (рис. 1) и значениями параметров (табл. 1) (по вариантам).
1. Записать дискретные передаточные функции разомкнутой и замкнутой системы.
2. Найти характеристическое уравнение замкнутой САУ.
3. Определить устойчивость импульсной САУ по аналогам алгебраических критериев устойчивости.
4. Определить устойчивость импульсной САУ по аналогу критерия Михайлова.
5. Определить устойчивость заданной системы по логарифмическим частотным характеристикам.
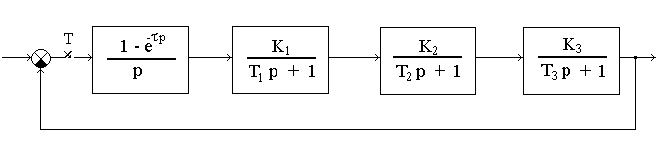
Рис. 1
Методические указания к выполнению задачи № 1
Дискретная передаточная функция разомкнутой линейной импульсной системы с экстраполятором нулевого порядка определяется по формуле:
![]() ,
,
где Wнч (P) – передаточная функция непрерывной части системы.
Уравнение, стоящее в фигурных скобах, необходимо представить в виде суммы простейших слагаемых:
![]() ,
,
найти значения A, B, C, D методом неопределенных коэффициентов и, воспользовавшись таблицей Z-преобразований, определить дискретную передаточную функцию Wp (Z).
Дискретная передаточная функция замкнутой системы рассчитывается по формуле:
![]() .
.
Если знаменатель этой функции приравнять к нулю, то получим характеристическое уравнение замкнутой системы: a0 Z3 + a1 Z2 + a2 Z + a3 = 0
Для
оценки устойчивости линейной импульсной
системы с помощью известных алгебраических
критериев необходимо от
Z-преобразований
перейти к V-преобразованиям
с помощью формулы:
![]() и по полученному характеристическому
уравнению: A0
V3
+ A1
V2
+ A2
V
+ A3
= 0 определить
устойчивость системы по критерию Рауса
или Гурвица.
и по полученному характеристическому
уравнению: A0
V3
+ A1
V2
+ A2
V
+ A3
= 0 определить
устойчивость системы по критерию Рауса
или Гурвица.
Если
в характеристическом уравнении (в Z
– изображении) заменить Z
на e jωΤ,
то использовав формулу Эйлера:
![]() ,
можно выделить вещественную и мнимую
составляющие функции Михайлова. Изменяя
частоту от 0
до П/Т,
рассчитываются соответствующие значения
этих составляющих и строится годограф
Михайлова, по которому можно сделать
вывод об устойчивости импульсной САУ.
,
можно выделить вещественную и мнимую
составляющие функции Михайлова. Изменяя
частоту от 0
до П/Т,
рассчитываются соответствующие значения
этих составляющих и строится годограф
Михайлова, по которому можно сделать
вывод об устойчивости импульсной САУ.
Для построения логарифмических частотных характеристик разомкнутой системы необходимо в передаточной функции Wp(Z) перейти к V – преобразованиям. При этом передаточная функция Wp(V) должна состоять из произведения передаточных функций типовых динамических звеньев. ЛАЧХ и ЛФЧХ разомкнутой системы строятся по известной методике.
Задача № 2
Рассчитать спектральную плотность ошибки замкнутой САУ с единичной отрицательной обратной связью при подаче на ее вход случайного сигнала типа "белый шум" со спектральной плотностью Sg (ω) = N, если передаточная функция разомкнутой системы имеет вид:
1.
![]()
2.
![]()
3.
![]()
4.
![]()
5.
![]()
6.
![]()
7.
![]()
8.
9.

10.
11.
![]()
12.
![]()
13.
![]()
14.
![]()
15.
![]()
16.

17.
18.
19.
20.
21.
![]()
22.
![]()
23.
![]()
24.
![]()
25.
![]()
26.
![]()
27.
![]()
28.
![]()
29.
![]()
30.
Методические указания к выполнению задачи № 2
Спектральная
плотность ошибки замкнутой САУ при
подаче на ее вход случайного сигнала
рассчитывается по формуле:
![]() ,
,
где,
![]() – частотная функция замкнутой САУ по
ошибке. Модуль данной функции определяется
известным способом.
– частотная функция замкнутой САУ по
ошибке. Модуль данной функции определяется
известным способом.
Задача № 3
Для электропривода постоянного тока с безынерционным тиристорным преобразователем требуется:
1. Определить закон оптимального по быстродействию управления на входе преобразователя, обеспечивающий перевод электропривода из начального состояния
Δα (0) = Δα0, ω(0) = ω0 = 0 в конечное положение Δα (t) = 0 и ω (t) = 0 при наличии ограничения на управление преобразователем Uу ≤ Uу max = ± 10В. Здесь Δα = α3 – α (t) – ошибка по углу;
α3 – требуемый угол перемещения.
2. Построить семейство фазовых троекторий при различных начальных условиях и оптимальном управлении Uопт (t).
3. Записать уравнение линии переключения управляющего воздействия как функцию скорости двигателя и ошибки по углу.
4. Составить структурную схему реализации оптимальной системы управления электроприводом по быстродействию.
Технические данные двигателя по вариантам приведены в табл. 2.
Методические указания к выполнению задачи № 3
При расчете заданного электропривода принять коэффициент усиления преобразователя
Кпр = 20. Сопротивление преобразователя следует считать равным сопротивлению якорной цепи электродвигателя. При решении задачи электромагнитной постепенной времени можно пренебречь. Задачу решать с помощью принципа максимума Понтрягина и метода фазовой плоскости.
Процесс решения задачи состоит из следующих этапов:
1. Записываются уравнения объекта управления в виде системы уравнений первого порядка, не забыв при этом уравнение для функционала: Y i = f i (U,Y, t)
2.
Составляется функция Гамильтона:
3. Определяется значение U, максимизирующие функцию Н,
4. Составляется уравнение для определения ψi (t)
![]() (i
= 1, 2, …, n)
(i
= 1, 2, …, n)
Через функцию выражается искомое оптимальное управление.
Поскольку рассматривается вопрос оптимизации системы управления по быстродействию, то уравнение функционала имеет вид:
Так как в уравнение функционала не входит управление, то его не нужно включать в функцию Н.
Приложение
Образец оформления обложки контрольной работы
Новосибирский государственный технический университет
Кафедра ЭАПУ
Контрольная работа № 4
по Теории автоматического управления
вариант задания _______
студента ___ курса, группы _______ специальности ______________________
Ф.И.О. (полностью)
Домашний адрес _____________________________________________________
почтовый индекс, город (поселок)
улица, № дома, № квартиры
Работа выполнена ____________________________
дата
Работа защищена _____________________________
дата
Преподаватель _______________________________________________________
подпись Ф.И.О.
Таблица 1
Вариант |
Значение параметров |
||||||
К1 |
К2 |
К3 |
Т1 |
Т2 |
Т3 |
Т |
|
1 |
5 |
2 |
8 |
0,1 |
0,01 |
0,09 |
0,002 |
2 |
6 |
8 |
2 |
0,14 |
0,05 |
0,085 |
0,01 |
3 |
2 |
4 |
10 |
0,13 |
0,04 |
0,08 |
0,0025 |
4 |
3 |
3 |
9 |
0,1 |
0,02 |
0,075 |
0,002 |
5 |
10 |
2 |
4 |
0,16 |
0,01 |
0,07 |
0,002 |
6 |
5 |
6 |
3 |
0,15 |
0,03 |
0,065 |
0,003 |
7 |
4 |
3 |
7 |
0,15 |
0,01 |
0,05 |
0,002 |
8 |
4 |
10 |
2 |
0,1 |
0,02 |
0,055 |
0,002 |
9 |
2 |
10 |
4 |
0,1 |
0,02 |
0,06 |
0,002 |
10 |
1 |
10 |
8 |
0,2 |
0,05 |
0,065 |
0,003 |
11 |
8 |
6 |
2 |
0,26 |
0,04 |
0,07 |
0,005 |
12 |
7 |
5 |
2 |
0,25 |
0,03 |
0,075 |
0,002 |
13 |
6 |
8 |
2 |
0,24 |
0,02 |
0,08 |
0,003 |
14 |
5 |
2 |
8 |
0,3 |
0,01 |
0,085 |
0,004 |
15 |
8 |
3 |
3 |
0,2 |
0,02 |
0,09 |
0,002 |
16 |
3 |
9 |
3 |
0,2 |
0,03 |
0,095 |
0,0025 |
17 |
2 |
9 |
4 |
0,1 |
0,04 |
0,15 |
0,003 |
18 |
8 |
5 |
2 |
0,12 |
0,045 |
0,2 |
0,0035 |
19 |
2 |
6 |
8 |
0,13 |
0,05 |
0,25 |
0,002 |
20 |
4 |
10 |
2 |
0,14 |
0,055 |
0,2 |
0,004 |
21 |
9 |
3 |
3 |
0,15 |
0,06 |
0,3 |
0,0015 |
22 |
6 |
5 |
3 |
0,16 |
0,045 |
0,09 |
0,003 |
23 |
7 |
4 |
3 |
0,17 |
0,04 |
0,08 |
0,004 |
24 |
10 |
4 |
2 |
0,18 |
0,035 |
0,07 |
0,003 |
25 |
8 |
1 |
10 |
0,2 |
0,03 |
0,06 |
0,005 |
26 |
2 |
6 |
8 |
0,21 |
0,025 |
0,05 |
0,004 |
27 |
8 |
2 |
5 |
0,22 |
0,02 |
0,055 |
0,002 |
28 |
6 |
4 |
3 |
0,23 |
0,028 |
0,07 |
0,003 |
29 |
5 |
6 |
3 |
0,24 |
0,032 |
0,09 |
0,004 |
30 |
9 |
8 |
1 |
0,25 |
0,044 |
0,1 |
0,005 |
Таблица 2
№ в-та |
Тип двигателя |
Рн, кВт |
Uн, В |
nн об/мин |
КПД, % |
Rяц, Ом |
J, кгм2 |
αз, град |
Т, с |
1 |
2ПБ-112L |
1,5 |
220 |
2240 |
80 |
1,48 |
0,018 |
400 |
2,5 |
2 |
2ПБ-112L |
2 |
220 |
3150 |
81 |
0,824 |
0,018 |
425 |
2 |
3 |
2ПН-132M |
1,6 |
220 |
750 |
68,5 |
3,27 |
0,038 |
450 |
2 |
4 |
2ПН-132M |
2,5 |
220 |
1000 |
73,5 |
1,843 |
0,038 |
480 |
1 |
5 |
2ПН-132M |
4 |
220 |
1500 |
7,9 |
0,9 |
0,038 |
280 |
3 |
6 |
2ПН-132L |
1,9 |
220 |
750 |
72 |
2,28 |
0,048 |
250 |
4 |
7 |
2ПН-132L |
3 |
220 |
1000 |
75,5 |
1,52 |
0,048 |
500 |
3,5 |
8 |
2ПН-132L |
5,5 |
220 |
1500 |
80,5 |
0,592 |
0,048 |
520 |
3 |
9 |
2ПБ-132L |
1,1 |
220 |
800 |
67 |
3,97 |
0,038 |
550 |
3 |
10 |
2ПБ-132L |
1,6 |
220 |
1000 |
70,5 |
2,38 |
0,038 |
600 |
1 |
11 |
2ПБ-132M |
2,4 |
220 |
1600 |
77 |
1,226 |
0,038 |
700 |
1,5 |
12 |
2ПБ-132M |
3,7 |
220 |
2360 |
81 |
0,57 |
0,038 |
650 |
2,5 |
13 |
2ПБ-132M |
1,5 |
220 |
3150 |
81,5 |
0,333 |
0,038 |
750 |
3,5 |
14 |
2ПБ-132L |
1,3 |
220 |
800 |
72 |
0,708 |
0,048 |
800 |
2,5 |
15 |
2ПБ-132L |
1,9 |
220 |
1060 |
76,5 |
1,995 |
0,048 |
830 |
3 |
16 |
2ПБ-132L |
3,2 |
220 |
1600 |
82,5 |
0,841 |
0,048 |
850 |
2 |
17 |
2ПБ-132L |
4,5 |
220 |
2200 |
84 |
0,489 |
0,048 |
900 |
2,5 |
18 |
2ПБ-132L |
5,3 |
220 |
3000 |
85,5 |
0,291 |
0,048 |
950 |
1 |
19 |
2ПО-132L |
1,8 |
220 |
1000 |
64,5 |
2,38 |
0,038 |
1500 |
1,5 |
20 |
2ПО-132L |
2,8 |
220 |
1500 |
76,5 |
1,055 |
0,038 |
1530 |
3,5 |
21 |
2ПО-132M |
4,5 |
220 |
2240 |
81 |
0,475 |
0,038 |
1350 |
4 |
22 |
2ПО-132L |
1,6 |
220 |
750 |
71 |
2,63 |
0,048 |
1400 |
4,5 |
23 |
2ПО-132L |
2,2 |
220 |
1000 |
75,5 |
1,52 |
0,048 |
900 |
3,5 |
24 |
2ПО-132L |
3,4 |
220 |
1600 |
81 |
0,708 |
0,048 |
930 |
3 |
25 |
2ПФ-132M |
2 |
220 |
750 |
67 |
2,953 |
0,038 |
700 |
3,5 |
26 |
2ПФ-132L |
3 |
220 |
1060 |
74 |
1,598 |
0,038 |
720 |
2 |
27 |
2ПФ-132M |
4 |
220 |
1500 |
80,5 |
0,78 |
0,038 |
750 |
2,5 |
28 |
2ПН-160M |
3 |
220 |
750 |
76,5 |
1,217 |
0,038 |
250 |
3,5 |
29 |
2ПН-160M |
4,5 |
220 |
1000 |
79,5 |
0,715 |
0,038 |
270 |
5 |
30 |
2ПН-160L |
4 |
220 |
800 |
78,5 |
0,875 |
0,1 |
300 |
5,5 |
Примечание: Число пар полюсов для всех электродвигателей, приведенных в таблице 2, равно 2.