

Модульна контрольна робота №2 з дисципліни «Сучасна теорія управління»
Варіант №21
1. Поясніть поняття: «Оптимальні системи управління». Де і з якою метою можуть застосовуватись такі системи?
2. Поясніть поняття «перерегулювання». Наведіть приклади систем з перерегулюванням, які Ви можете зустріти в житті.
3. Визначте стійкість наведеної системи за критерієм Михайлова.

Викладач: ____________________ ( )
Завідувач кафедри: ____________________ ( )
Національний авіаційний університет
Інститут комп’ютерних інформаційних технологій
Кафедра комп’ютеризованих систем управління
Напрям підготовки: 6.050102 «Комп’ютерна інженерія»
Модульна контрольна робота №2 з дисципліни «Сучасна теорія управління»
Варіант №22
1. Поясніть поняття: «робастні системи управління». Де і з якою метою можуть застосовуватись такі системи?
2. Поясніть поняття «коливальність». Наведіть приклади систем, що проявляють властивість коливальності. Чи є коливальність бажаною або небажаною в роботі таких систем?
3. Побудуйте логарифмічні амплітудно-частотну та фазочастотну характеристики наведеного ПІ-регулятора, якщо К=3, Т=10 с.

Викладач: ____________________ ( )
Завідувач кафедри: ____________________ ( )
Національний авіаційний університет
Інститут комп’ютерних інформаційних технологій
Кафедра комп’ютеризованих систем управління
Напрям підготовки: 6.050102 «Комп’ютерна інженерія»
Модульна контрольна робота №2 з дисципліни «Сучасна теорія управління»
Варіант №23
1. Охарактеризуйте реакцію лінійної автоматичної системи на гармонічний вхідний сигнал. Наведіть приклади впливів гармонічних сигналів на реальні автоматичні системи.
2. Поясніть словосполучення: «Вимоги до якості системи управління в частотній області». Наведіть приклад формулювання таких вимог.
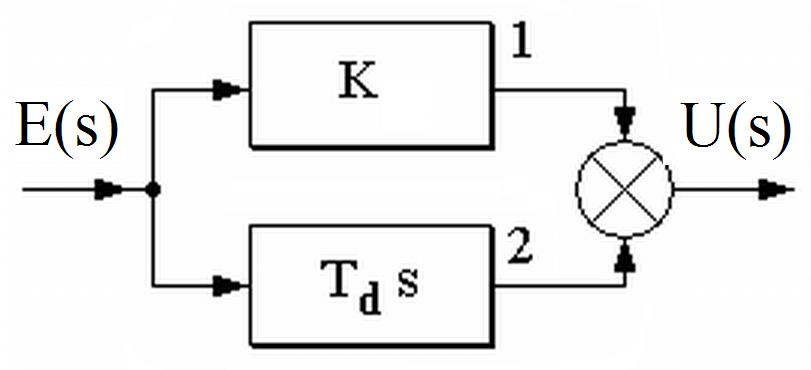
3. Побудуйте логарифмічні амплітудно-частотну та фазочастотну характеристики наведеного ПД-регулятора, якщо К=3, Тd=10 с.
Викладач: ____________________ ( )
Завідувач кафедри: ____________________ ( )
Національний авіаційний університет
Інститут комп’ютерних інформаційних технологій
Кафедра комп’ютеризованих систем управління
Напрям підготовки: 6.050102 «Комп’ютерна інженерія»
Модульна контрольна робота №2 з дисципліни «Сучасна теорія управління»
Варіант №24
1. Наведіть приклади використання похідних та інтегралів від помилки в законі управління.
2. Поясніть відомі Вам способи підключення коригуючих пристроїв в системах управління, наведіть приклади.
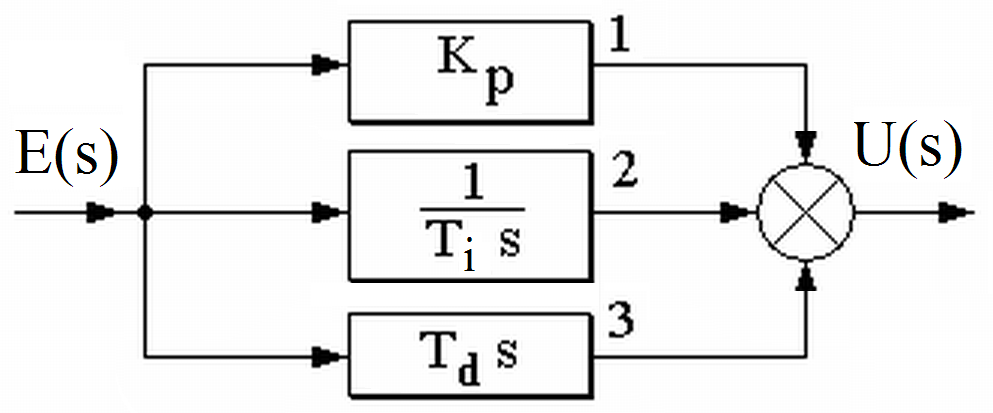
3. Побудуйте логарифмічні амплітудно-частотну та фазочастотну характеристики наведеного ПІД-регулятора, якщо К=2, Тd=1 с, Тi=10 с, .
Викладач: ____________________ ( )
Завідувач кафедри: ____________________ ( )
Національний авіаційний університет
Інститут комп’ютерних інформаційних технологій
Кафедра комп’ютеризованих систем управління
Напрям підготовки: 6.050102 «Комп’ютерна інженерія»