

Управление скоростью на тормозных режимах
Одним из основных этапов движения является торможение. Поэтому в теории автомобиля этот этап управления выделяется в самостоятельный раздел - тормозное управление. Автомобиль оборудуется рабочими, запасными и стояночными тормозными системами. Они предназначаются для снижения скорости движения при нормальном и экстренном торможении, а также для поддержания скорости на спусках в заданных пределах и удержания автомобиля на стоянке. Тормозные системы должны обеспечивать эффективность торможения, устойчивость движения при торможении и управляемость при движении, надежность, стабильность тормозных свойств и плавность воздействия на объект управления.
Командные системы управления торможением
В командных системах управления могут использоваться механические, гидравлические, пневматические, электрические усилители и исполнительные механизмы (приводы). Источником энергии для систем управления могут быть мускульная сила водителя, силовая механическая установка, насосы, компрессоры и электрические источники тока. По степени автоматизации они могут быть ручными и автоматизированными.
Механическую рычажную систему применяют для управления с помощью рычагов, приводимых в движение мышечной силой водителя посредством органов управления (рукояток, педалей) муфтами, тормозами машин малой мощности. Нормальное усилие на рычаги не должно превышать 30...40 Н при ходе не более 25 см, а на педали - не более 80 Н при ходе не более 20 см. Усилие, прикладываемое к рукоятке или педали, усиливается посредством рычагов трансмиссии и передается к исполнительным органам.
На рис. 4, а приведена схема управления ленточным тормозом от рукоятки. Движение от рукоятки 1 через регулирующую тягу 2 передается рычагу 3, который затягивает ленту 4, передавая на ось тормозную силу Втр. На принципиальной схеме (рис. 5, б) показаны рукоятка HS, регулирующий орган РО (тормозной механизм) и объект управления ОУ (ось колеса).
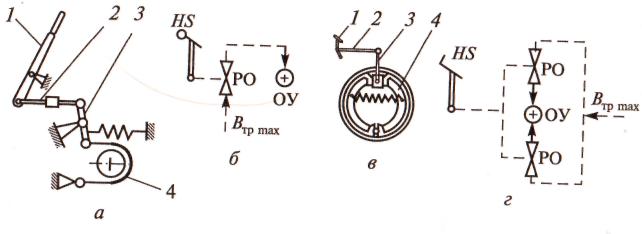
Рис. 4. Механическая система командного управления:
а и б - соответственно конструктивная и принципиальная схемы управления ленточным тормозом;
в и г - соответственно конструктивная и принципиальная схемы управления барабанным тормозом
На рис. 4, в приведена схема управления барабанным тормозом от педали. Движение от педали 1 через тягу 2 передается рычагу 3 с разжимным устройством - кулаком, который разводит колодки 4. На принципиальной схеме (рис. 4, г) показана педаль HS, регулирующие органы РО (тормозной механизм) и объект управления ОУ (ось колеса).
Этот вид управления прост, удобен в обслуживании, но утомителен для человека из-за сравнительно больших усилий, необходимых для перемещения рукояток и педалей.
Системы управления с гидравлическим приводом бывают двух видов: непосредственного управления прямого действия (безнасосные) и с дополнительным источником энергии (насосные). В-первых, рабочее давление в гидросистеме создается мускульной силой водителя, воздействующего на педаль, рычаг или рулевое управление, во-вторых - энергией дополнительного источника (насосом).
Системы управления с пневматическим приводом. Командные системы управления с пневматическим приводом отличаются от систем с гидравлическим приводом тем, что в них вместо жидкости используется сжатый газ. На рис. 5 приведена командная система управления с пневматическим приводом.
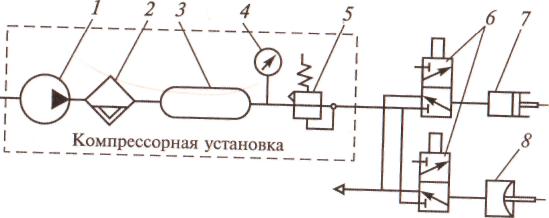
Рис. 5. Командная система управления с пневматическим приводом
Преимуществами пневматических систем управления являются простота конструкции и мягкость включения механизмов. Недостатки пневмосистем связаны с трудностями очистки воздуха - от примесей и в первую очередь от влаги, а также с низким давлением воздуха 0,7...0,8 МПа, что увеличивает габариты пневмоагрегатов.
Электрические системы управления применяются там, где используются исполнительные электрические механизмы и электропривод. В настоящее время электрические системы управления вытесняют пневматические и гидравлические. Они осуществляют пуск и останов электродвигателей, их реверс, изменение частоты вращения валов и защиту агрегатов.
Комбинированные системы управления представляют собой объединение элементов, использующих различные виды энергоносителей. Применяются пневмогидравлические системы, но наиболее распространены электропневматические и электрогидравлические. Их достоинства - возможность применения дистанционного управления и сокращение длины масло- и воздухопроводов.