

Синтез корректирующих устройств
Корректирующие устройства синтезируют на основании требований к свойствам САУ. Для этого необходимо знать передаточную функцию реальной САУ Wреал, которая чем то не удовлетворяет разработчика, и желаемую передаточную функцию Wжел , которой должна обладать САУ в результате корректировки ее свойств.
При синтезе корректирующих устройств сначала определяю передаточную функцию возможного последовательного корректирующего устройства исходя из соотношения: Wп = Wжел /Wреал. Затем выясняют, при каких передаточных функциях параллельно-согласного Wпс и параллельно-встречного Wпв корректирующих устройств будет получен тот же эффект. После этого решают, какое из них более целесообразно и проще создать. При этом исходя из рис.115 можно записать:
Wжел = W Wп = W1 W2.(W3 + Wпс) = W (1 + Wпс/W3) = W/(1 + W2 Wпв),
г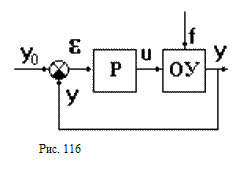 де
W
= W1
W2
W3.
Из этого соотношения можно определить
формулы перехода от одного корректирующего
устройства к другому.
де
W
= W1
W2
W3.
Из этого соотношения можно определить
формулы перехода от одного корректирующего
устройства к другому.
Коррекция свойств сау изменением параметров звеньев
Рассмотрим примеры коррекции свойств некоторой исходной замкнутой САУ (рис.116), передаточная функция которой в разомкнутом состоянии:
W(p)
=
 .
.

Для этого воспользуемся критерием Найквиста. Значения параметров звеньев в каждом конкретном случае будем оговаривать отдельно.
Изменение коэффициента передачи
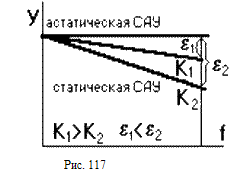
Для увеличения точности статической САУ надо увеличивать коэффициент передачи K. С ростом K увеличивается жесткость статической характеристики САУ (рис.117), то есть уменьшается статическая ошибка e.
На рис.118 сплошными линиями показаны частотные характеристики исходной разомкнутой САУ при T1 = 0.5c, T2 = 0.02c, T3 = 0.002c, K = 10.
При увеличении коэффициента передачи K в N раз ЛАЧХ, не меняя своей формы, поднимается вверх на 20lgN (на рисунке изображена пунктирной линией). При этом ЛФЧХ остается без изменения. Из рисунка видно, что с увеличением коэффициента передачи запас устойчивости по модулю уменьшается с h 30дб/дек до hк 15дб/дек, по фазе - с 60o до к 15o .
То есть, при повышении точности САУ путем увеличения коэффициента передачи необходимы мероприятия по повышению запаса устойчивости. Это главный недостаток такой коррекции.
К достоинствам можно отнести повышение быстродействия САУ, так как частота среза wср увеличивается, следовательно постоянная времени САУ - уменьшается.
Изменение постоянной времени звена сау
 На
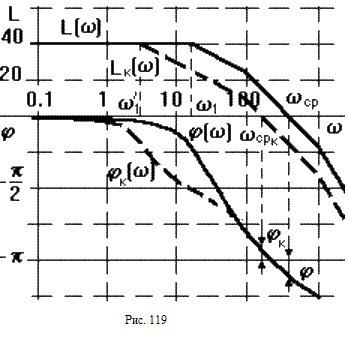
рис.119 сплошными линиями изображены ЛЧХ
разомкнутой САУ с параметрами: T1
= 0.05c,
T2
= 0.01c,
T3
= 0.001c,
K
= 100. Из рисунка видно, что САУ неустойчива.
При увеличении постоянной времени T1
в 5 раз (T1’
= 0.2с) ЛАЧХ и ЛФЧХ приобретают вид,
показанный на рисунке пунктирной линией.
При этом видим, что замкнутая САУ
становится устойчивой. Заметим, что
сопрягающая частота W1
данного звена располагается левее
частоты среза
ср.
Если бы она располагалась правее частоты
среза, то есть, если бы мы увеличивали
постоянную времени, например, третьего
звена T3,
то это привело бы к уменьшению запаса
устойчивости.
На
рис.119 сплошными линиями изображены ЛЧХ
разомкнутой САУ с параметрами: T1
= 0.05c,
T2
= 0.01c,
T3
= 0.001c,
K
= 100. Из рисунка видно, что САУ неустойчива.
При увеличении постоянной времени T1
в 5 раз (T1’
= 0.2с) ЛАЧХ и ЛФЧХ приобретают вид,
показанный на рисунке пунктирной линией.
При этом видим, что замкнутая САУ
становится устойчивой. Заметим, что
сопрягающая частота W1
данного звена располагается левее
частоты среза
ср.
Если бы она располагалась правее частоты
среза, то есть, если бы мы увеличивали
постоянную времени, например, третьего
звена T3,
то это привело бы к уменьшению запаса
устойчивости.
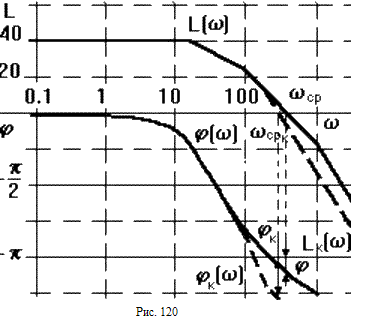
Частотные характеристики для этого случая приведены на рис.120.
Аналогичное влияние оказывает постоянная времени колебательного звена. Влияние постоянной времени форсирующего звена обратное, то есть, если сопрягающая частота форсирующего звена располагается левее частоты среза, то увеличение его постоянной времени уменьшает запас устойчивости САУ, если правее, то запас устойчивости увеличивается.
Указанные зависимости справедливы лишь при условии, что сопрягающая частота расположена на некотором удалении (около одной декады) от частоты среза. Бывают и исключения из этого правила.