

Метод трапеций
Этот метод основан на свойствах ВЧХ, следующих из полученной ранее формулы, которые мы рассмотрим без доказательств.
1. Свойство линейности: если ВЧХ можно представить суммой P( ) = SPi( ), то каждой составляющей Pi( ) будет соответствовать составляющая переходной характеристики

 ,
,

при
этом
h(t)
=
![]() (рис.111
а). Поэтому, если ВЧХ имеет сложную форму,
ее можно представить суммой трапециидальных
ВЧХ, примыкающих к вертикальной оси.
Затем все трапеции перерисовывают,
перенося их основания на горизонтальную
ось (рис.111 б). Каждой такой трапеции
соответствует своя составляющая
переходной характеристики hi(t),
имеющая апериодический характер (рис.111
в). Результирующая кривая строится
суммированием данных составляющих.
(рис.111
а). Поэтому, если ВЧХ имеет сложную форму,
ее можно представить суммой трапециидальных
ВЧХ, примыкающих к вертикальной оси.
Затем все трапеции перерисовывают,
перенося их основания на горизонтальную
ось (рис.111 б). Каждой такой трапеции
соответствует своя составляющая
переходной характеристики hi(t),
имеющая апериодический характер (рис.111
в). Результирующая кривая строится
суммированием данных составляющих.
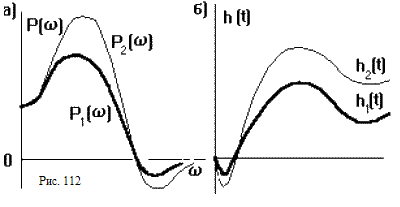
2. Если умножить P( ) на постоянный множитель а, то соответствующая ей h(t) также умножается на а. То есть, чем выше ВЧХ, тем выше и переходная характеристика (рис.112).
3. Если аргумент w в выражении ВЧХ P( ) умножить на постоянный множитель а, то аргумент в h(t) будет делиться на это число, то есть
То есть переходный процесс в случае P(a ) будет протекать в а раз быстрее, чем в случае P( ) (рис.113).
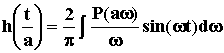
Р ассмотрим
трапециидальную ВЧХ (рис.114 а). Она
характеризуется коэффициентом наклона
k
=
1
2.
Под единичной
трапецией
(рис.114 б) понимают трапецию, две стороны
которой совпадают с осями координат и
равны по 1 в соответствующих масштабах;
наклон k
может
быть различным:
ассмотрим
трапециидальную ВЧХ (рис.114 а). Она
характеризуется коэффициентом наклона
k
=
1
2.
Под единичной
трапецией
(рис.114 б) понимают трапецию, две стороны
которой совпадают с осями координат и
равны по 1 в соответствующих масштабах;
наклон k
может
быть различным:
P1(
)
=
 .
.
Подставляя это определение в выражение для определения h(t) можно вычислить кривую переходного процесса, соответствующую единичной трапециидальной ВЧХ. Эти расчеты были проделаны и составлены таблицы hk -функций.
Для любой трапециидальной ВЧХ, на которые разбита реальная ВЧХ (рис.111 б), можно построить подобную ей единичную трапецию со значением k = 1 2, где 1 - частота, соответствующая перелому реальной трапеции, 2 - основание трапеции реальной ВЧХ. Для данной единичной трапеции по таблице hk-функций строят кривую hk(k,t), где t - время. Затем, используя свойства 2 и 3 масштабирования ВЧХ и переходной характеристики строят кривую переходного процесса, соответствующего данной трапециидальной ВЧХ. Причем оба описанных процесса можно совместить: сначала задаются моментом времени t, для него по таблице находят значение hk(k,t), потом умножают это значение на P(0) (масштабирование по вертикальной оси) и откладывают полученное значение на графике h(t) для времени t = t/ 2 (масштабирование по горизонтальной оси). Строя, таким образом, точки для различных моментов времени получают кривую
hi(t/ 2) = P(0) hk(k,t).
-
t
hk(k,t)
t = t/ 2
hi(t) = P(0) hk(k,t)
.....
.....
.....
После суммирования составляющих переходного процесса, соответствующих каждой трапеции, получают реальную характеристику h(t).
Описанный метод построения переходной характеристики называется методом трапеций.