

Привод рабочих органов механических объектов.
Для приведения в действие механических агрегатов, машин и механизмов механических объектов управления необходимо применение в системе управления механических устройств воздействия. Такие устройства используют механическую энергию в целях формирования требуемых усилий (моментов) для совершения работы и обеспечения необходимых скоростей и ускорений при перемещении рабочих органов машин и движителей. Механические устройства воздействия используются также для приведения в действие дозирующих регулирующих органов (насосов, компрессоров, вентиляторов, дозаторов) в системах управления и регулирования гидравлическими, пневматическими, тепловыми и другими объектами управления.
Механическое устройство воздействия, выполняющее функции исполнительного механизма в системе управления, в технике получило название привод.
Привод с комбинированными энергетическими установками
Если в силовом агрегате привода используются несколько различных по природе источников энергии, то такой привод называется приводом с комбинированной энергетической (силовой) установкой. Целесообразность применения такого привода определяется конкретными условиями эксплуатации машины, механизма и т.д. В настоящее время все больше применяются комбинированные энергетические установки (КЭУ) для привода ведущих колес автомобилей. КЭУ включает в себя ДВС для длительной работы и аккумуляторную тяговую батарею (АТБ) для кратковременного гашения пиковых нагрузок. В настоящее время КЭУ может содержать накопительный конденсатор большой емкости. Совершенствование накопительных конденсаторов дает основание предполагать, что они смогут в ряде случаев заменять АТБ на тяговых режимах.
На АТС могут использоваться различные структурные схемы компоновки комбинированной энергетической установки с тяговым силовым приводом и объектом управления. На рис. 16 приведена структурная схема системы управления ведущими колесами. В состав системы входят КЭУ, построенная на основе традиционной схемы автомобиля с ДВС, механическое передаточное устройство, включающее в себя сцепление Сц и коробку передач КП, и механическая трансмиссия МТр. В такой схеме ДВС имеет постоянную кинематическую связь с ведущими колесами АТС, которые являются объектом управления. По существу в любом современном автомобиле применяется комбинированная энергетическая установка, только функции электропривода ограничиваются пуском ДВС.
В КЭУ автомобиля входят: ДВС, электрический генератор ЭГ, аккумуляторная батарея АБ, накопительный конденсатор НК, электрический привод пуска ДВС, основу которого составляет электрический двигатель пуска ЭДП. Привод пуска соединяется с ДВС через муфту М. Соединение ЭГ, АБ и НК осуществляется через цепи коммутации ЦК. Механическая энергия от ДВС через сцепление Сц, коробку передач КП и механическую трансмиссию МТр передается на ведущую ось ВО, выполняющую функции рабочего органа РО, и далее на ведущие колеса ВК. К колесам прикладывается крутящий (подводящий) момент Мк и момент сопротивления (отводящий момент) Мс. В такой системе электродвигатель пуска должен быть доработан так, чтобы он мог выполнять функции тягового электродвигателя и брать на себя пиковые нагрузки на тяговых режимах. Общая управляющая подсистема и локальные подсистемы управления системы управления ведущими колесами на схеме не показаны. На схеме потоки механической энергии обозначены двойной линией, потоки электрической энергии с напряжением Ut – одинарной линией.
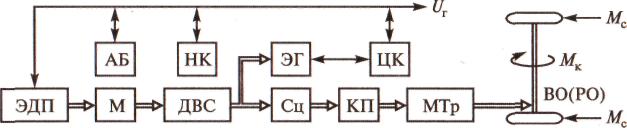
Рис.16. Структурная схема системы управления ведущими колесами
с традиционной схемой компоновки энергетической установки
и механической транмиссии.
Разработка обратимых электрических преобразователей (ОЭП) позволила объединить электрический генератор и электродвигатель пуска в одной электрической машине. Такие системы управления ведущими колесами начинают широко использоваться на автомобилях. В них функции ЭДП расширены. Автоматическая система управления энергетической установкой позволяет автоматически переключать режимы работы генератора и электродвигателя в зависимости от режима движения автомобиля.