

Управление подвеской автомобилей
В автомобиле как транспортном средстве объектом управления выступает несущий кузов или рама. На них устанавливаются устройства для размещения водителя, пассажиров и груза. Для передачи кузову или раме тяговых и тормозных сил используются направляющие устройства. Их конструкция включает в себя различного рода рычаги, тяги, шарниры, упоры, ограничители и т.д. Направляющие устройства обеспечивают также вертикальное перемещение колес.
На кузов действуют возмущающие механические воздействия, которые могут быть статическими и динамическими. К статическим относят вес автомобиля и груза, а к динамическим - инерционные силы и реакцию колес на толчки и удары о неровности дороги.
Взаимодействие колес и дороги является сложным процессом, который представляется суммой гармонических колебаний с широким спектром частот и амплитуд. Механические возмущения вызывают колебания и вибрации автомобиля и влияют практически на все основные эксплуатационные показатели АТС: устойчивость, управляемость, проходимость, скорость движения, экономичность, надежность, долговечность и т.д.
Способность систем автомобиля (шин, подвески, сидений и т.д.) защитить водителя, пассажиров и груз от механических воздействий (колебаний, вибраций, толчков, ударов), возникающих в результате взаимодействия колес с дорогой, называется плавностью хода. Обеспечить плавность хода АТС возможно только путем применения систем автоматического регулирования. Так как кузов автомобиля является многомерным объектом управления, то обеспечить выполнение современных требований по этому показателю удается только путем использования многопараметрических, многоканальных автоматических систем управления. Основной целью управления в такой системе является поддержание заданного положения кузова, которое определяется размером просвета автомобиля или расстоянием между кузовом и мостом (колесами) автомобиля и углами наклона (кабрирования, пикирования и крена).
Автоматическое управление подвеской автомобилей
Системы автоматического управления подвеской автомобилей (САУ ПА) в своем развитии прошли несколько этапов.
Первые системы управления использовали механические регуляторы с амплитудными видами модуляции. Главным назначением таких систем регулирования было поддержание высоты кузова относительно колес на заданном уровне независимо от загрузки. Схема системы атоматического регулирования (САР) положения кузова для грузовых автомобилей и автобусов представлена на рис. 11. Подвеска представляет собой комбинацию полуэллиптических рессор, выполняющих функции направляющего устройства и упругого преобразователя, телескопических гидравлических амортизаторов, выполняющих функции гасящего устройства, и двухсекционных пневматических рессор (пневмобаллоны) на основе резинокордовой оболочки с резиновыми буферами для ограничения хода сжатия. Пневморессоры снабжены дополнительными пневмокамерами и являются не только упругими преобразователями, но и гасителями колебаний. Сжатый воздух в пневматические рессоры поступает от ционного клапана 3 и ресивера 4. Ресивер соединен с распределителем 5, шток поршня клапанов которого перемещается через рычаги 6. Распределитель подает воздух в пневморессоры 8 или сбрасывает его в атмосферу. Дополнительная пневмокамера соединена с пневморессорами. пневмосистемы автомобиля, состоящей из компрессора 1, фильтра 2, редуктор.
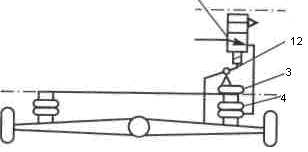
Рис.11.Схема
системы автоматического регулирования
положения кузова
18
Наличие этой камеры делает подвеску более мягкой, сглаживается увеличение давления в упругом элементе при его осадке. Корпус распределителя установлен на кузове, а его шток с поршнем рычагом б связан с мостом автомобиля. Регулятор при различных полезных нагрузках машины обеспечивает одно и то же расстояние между мостом и кузовом. При возрастании статической нагрузки упругие пневматические элементы сжимаются, расстояние между мостом и кузовом уменьшается. Поршень распределителя, перемещаемый рычагом б вниз, открывает подачу воздуха из ресивера в упругие элементы до тех пор, пока не восстановится прежнее положение кузова, обусловленное предварительной настройкой регулятора. При уменьшении статической нагрузки поршень, перемещаясь вверх, выпускает воздух из пневматических элементов в атмосферу и восстанавливает первоначальное положение кузова.
Чтобы регулятор не срабатывал при колебаниях автомобиля, имеется гидравлический замедлитель, обеспечивающий включение регулятора лишь через несколько секунд после изменения расстояния между кузовом и мостом, т. е. при отклонении только статической нагрузки.
Системы на пневмомеханических элементах не обеспечивают необходимую надежность и качество регулирования. Высокая стоимость и сложность настройки ограничили их применение.
На рис. 12 приведена схема электропневматической САР положения кузова. Она включает в себя электрическую часть, расположенную под полом автомобиля, и пневматическую часть, размещенную в салоне кузова. Толкатель 2 регулятора соединен с балкой моста 7 автомобиля и коромыслом 3. Коромысло состоит из двух частей, связанных между собой пружиной 4. Оно опирается на опору 5, закрепленную на кузове автомобиля. Электрический контакт 16 коромысла может замыкаться с неподвижными контактами 6 и 17. При замыкании контактов включается электромагнит 7 или 75 электромагнитных клапанов. Выходы 9 и 72 соединены с упругими элементами 77 подвески, вход 14 - с ресивером 10 пневмосистемы автомобиля, выход с атмосферой. Питание электрических элементов осуществляется от источника питания 13. С возрастанием нагрузки на кузов коромысло поворачивается на опоре и замыкает контакты 17. Включается электромагнит 75 и ЭМК Б перемещается в положение II, воздух из ресивера 10 поступает через входы 14 и 12 в упругие элементы до тех пор, пока не установится заданное положение кузова и не разомкнутся контакты 77 и 16. При уменьшении нагрузки замыкаются контакты 6 и 16, включается электромагнит 7, ЭМК А занимает положение I, соединяя упругие элементы через вход 9 и выход 8 с атмосферой. Это происходит до тех пор, пока кузов не вернется в заданное положение и не разомкнутся контакты 6 и 16.
Использование электротехнических элементов позволило повысить качество САУ ПА. Дальнейшее совершенствование систем было направлено на замену механических датчиков на электронные.
Схема САУ ПА с использованием оптоэлектронного датчика положения кузова приведена на рис. 13. Система включает в себя пневматическую рессору на основе РКО с гидравлическим амортизатором 7, на штоке 2 которого имеется прорезь, выполняющая роль чувствительного элемента оптоэлектронного датчика перемещений. В датчике используется инфракрасное излучение, создаваемое светодиодом VI и поступающее на фотодиоды V2, V3 через световоды 5 и 4, установленные на отметках GB и GH, соответствующих верхнему и нижнему заданному положению кузова. Излучение от светодиода VI подается через световод 3. Сигналы с фотодиодов V2, V3 формируются формирователями F2(x2) и 77(х1) и поступают на дешифратор DC, выполняющий функции устройства управления. С выхода дешифратора команда ух поступает на электромагнитный клапан {Ml, B1), а команда у2 - на электромоторный привод М2 компрессора В2. Алгоритм работы системы поясняется диаграммой состояния дешифратора DC. При G> GB включается электромагнитный клапан и воздух стравливается в атмосферу, при G <GH включается компрессор. При заданном положении кузова исполнительные механизмы отключены. Для исключения реагирования системы на динамические перемещения кузова в устройство управления вводят таймер для задержки включения ИМ. Такие системы, выполненные практически на электронных элементах, обладают значительно большей надежностью.
Как видно из рассмотренных САУ ПА, все они имеют одинаковую структуру, а отличие заключается в применяемой элементной базе, виде модуляции и числе параметров, используемых для формирования закона управления

Рис. 12. Схема электропневматической САР положения кузова
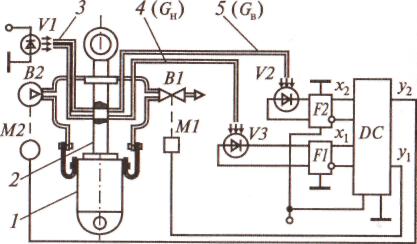
Рис. 13. Схема системы автоматического управления положением кузова
с оптоэлектронным датчиком
Типовая структурная схема САУ ПА с использованием микропроцессора приведена на рис. 14. В этой системе можно выделить ряд функциональных устройств.
Датчики. Они воспринимают параметры (xj ...x„), характеризующие работу автомобиля практически при всех режимах движения, и расположены по всему автомобилю. В разных системах используют разное количество датчиков. Основными параметрами являются: положение кузова, положение штока пневморессоры, положение дроссельной заслонки, угол поворота колес, положение переключателя передач, скорость движения автомобиля, поперечные, продольные и вертикальные ускорения, а также неровность дороги. Для восприятия этих параметров используются датчики разных типов с применением практически всех видов модуляции.
Устройства согласования датчиков с микропроцессором УСО1 предназначены для согласования различных датчиков с микропроцессорным контроллером. Они преобразуют неэлектрические параметры в электрические сигналы. При современной технологии изготовления больших интегральных схем часто эти устройства интегрируются в единую конструкцию (в один корпус с микропроцессором).
Микропроцессор выполняет функции УУ и ОИ и является контроллером системы. Из большого разнообразия микропроцессоров выбирают такой, который обеспечивает необходимую производительность и работу в условиях эксплуатации автомобиля (вибрации, температура, влажность и т.д.). В микросхему МП могут включаться и выходные усилители мощности.
Устройства согласования микропроцессора с исполнительными устройствами УС02 предназначаются для преобразования электрических сигналов с МП в пневматические или гидравлические команды, необходимые для исполнительных устройств. Это электропневматические (ЭПП) и электрогидравлические преобразователи (ЭГП).
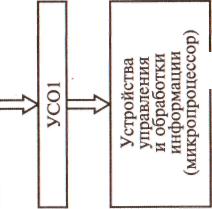
Рис. 14. Типовая структурная схема САУ ПА
с использованием микропроцессора
В их основе лежат дросселирующие (клапанные) и дозирующие (компрессорные и насосные) регулирующие устройства. Для их работы необходима дополнительная энергия (пневматическая или гидравлическая), которая поступает от насосов или компрессоров с приводом от электромоторов или непосредственно от ДВС автомобиля в виде рабочего тела (жидкости или газа под давлением). Гидравлические и пневматические системы питания могут быть замкнутыми и разомкнутыми. На АТС используют замкнутые гидравлические системы. В этом случае при реверсе привода необходимо регенерировать отработавшее рабочее тело. Для этого используют специальные резервуары и гидропневмоаккумуляторы. Основу дросселирующих устройств составляют электромагнитные клапаны. Их недостаток - малые проходные сечения. В подвесках стали использовать клапаны с вращательным движением затвора и приводом от шагового электродвигателя. Такие электромашинные клапаны имеют больший диапазон изменения перепускного отверстия.
Исполнительные устройства. В качестве ИУ широко используются гидропневматические и пневмогидравлические рессоры (первые преобразуют гидравлическую энергию в механическую, обеспечивающую перемещение рабочего органа, а вторые пневматическую энергию в механическую). Пневматические и гидравлические элементы в соответствующих устройствах выполняют функции гасящих устройств. Число колес, по которым ведется управление, в разных системах различно и может меняться.
Схема САУ ПА с микропроцессорным управлением приведена на рис. 15.
Такие системы подвесок имеют ряд преимуществ: стабилизируется положение кузова относительно дороги (дорожный просвет), улучшается плавность хода, повышается безопасность эксплуатации автомобиля из-за улучшения устойчивости и управляемости, уменьшается крен на поворотах, а также пикирование кузова при разгоне и торможении.

Рис. 15. Схема САУ ПА с микропроцессорным управлением
Система оснащена датчиком ускорений (акселерометром) SE5 и потенциометрическими датчиками GE1...GE4 положения штока гидропневматической рессоры (ГПР). По информации с датчиков микропроцессорный контроллер осуществляет управление подвеской по программе, заложенной в его память.
Система может выполнять следующие функции: поддерживать постоянным дорожный просвет, принудительно опускать кузов на определенную величину при большой скорости, изменять жесткость упругих элементов и сопротивление амортизаторов. Устройства согласования включают в себя пять электромагнитных гидравлических клапанов, конструктивно объединяющих исполнительный механизм (М) и регулирующий орган (В). Клапан (М5, В5) включен в контур питания, остальные (M, В1... М4, В4) управляют давлением в четырех гидропневматических рессорах ГПР1...ГРП4.
Контур питания содержит гидронасос с приводом через редуктор от коленчатого вала, распределитель и гидропневмоаккумулятор ГПА.