

Рулевое управление с электроприводом
В современных системах управления направлением движения АТС в качестве исполнительного устройства используется электропривод, а при управлении поворотом всех колес применяются микропроцессорные контроллеры.
Конструктивная схема системы управления направлением движения АТС с исполнительным электроприводом представлена на рис. 10. Это командная система управления. Она содержит рулевую колонку, которая включает в себя штурвал 1 (орган управления), датчик углового положения штурвала 2 и нагружающий механизм 3, устройство управления и обработки информации 4 (контроллер); исполнительный механизм, включающий в себя электродвигатель 5 и редуктор 6, механизм перемещения колеса 7 с датчиком 8 утла поворота колеса и объект управления 9 (управляемые колеса). Такие системы управления не имеют кинематической связи штурвала (органа управления) с колесами (объектом управления) и поэтому получили название «управление по проводам». Для повышения управляемости и устойчивости автомобиля на дороге УУ и ОИ анализирует поступающие к нему команды от водителя и объекта управления и оптимизирует управление в соответствии с заложенным алгоритмом.
Сигнал с датчика 2 преобразует угловое положение штурвала в электрический сигнал, поступающий на вход УУ и ОИ, который анализирует и оптимизирует этот сигнал в реальном масштабе времени и выдает управляющую команду на исполнительное устройство для поворота управляемых колес на желаемый угол. Силовой привод управления колесами обеспечивает также обратную связь по углу отклонения колес. Для этого используются датчик 8 и нагружающий механизм 3, который имитирует увеличение усилия на штурвале при больших углах поворота колес.
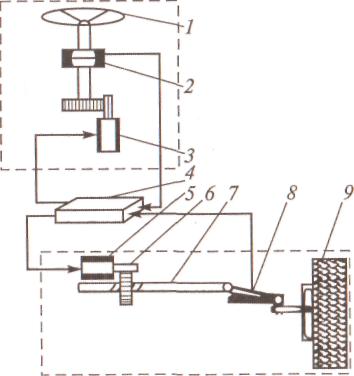
Рис. 10. Конструктивная схема системы управления направлением движения АТС с исполнительным электроприводом
Управление плавностью хода атс. Управляемые конструкции
Традиционные конструкции являются самоуправляемыми объектами, которые восстанавливают свое состояние за счет внутренних деформационных процессов. Основные представления о внутренних процессах и поведении конструкции в пределах упругих деформаций в различных условиях дают такие дисциплины, как теория твердого тела, сопромат, теория упругих колебаний и механика. Внешняя сила (нагрузка) вызывает деформацию конструкции, в результате чего в ней возникает восстанавливающая сила. При этом энергия источника, создающего внешнюю силу, преобразуется в тепловую энергию и рассеивается в окружающую среду. В составе такой конструкции всегда можно выделить упругий преобразователь, напряженно-деформационное состояние (НДС) которого определяется зависимостью
B=f{G),
где В - сила или момент силы на входе преобразователя; деформация, G- вызванная силой.
Возможно изменение НДС и под действием температуры. Функциональное назначение упругих преобразователей зависит от устройства, в котором они используются. В устройствах измерения они выполняют функции информационных преобразователей, в устройствах воздействия — механических исполнительных устройств. В самоуправляемых конструкциях все функции совмещаются в одном преобразователе. В традиционных конструкциях с применением упругих преобразователей, используемых в машиностроении и строительстве, учитывают и нормируют только их деформируемость под воздействием внешних сил.
Развитие науки и техники идет по пути повышения уровня управляемости различных объектов, в том числе и конструкций. На определенном этапе развития встал вопрос управления напряженно-деформированным состоянием конструкций на разных стадиях функционирования. Переход к управлению деформированием конструкции на современном этапе открывает большие возможности для инженерного конструирования. В технике разработаны и используются упругие преобразователи непрямого действия, с корректирующей обратной связью, уравновешивающего преобразования.
В настоящее время формируется новое научное направление - управляемые конструкции, объединяющее классическую механику, теорию управления (теорию автоматического регулирования) и теорию преобразователей. Оно с единых позиций объясняет поведение конструкции при саморегулировании, формулирует требования к параметрам управляемой конструкции и позволяет оптимально выбрать законы управления. В ряде случаев традиционные конструкции практически исчерпали свои возможности. Управляемые конструкции - это конструкции нового класса, представляющие собой деформируемые системы с управляемыми параметрами. Это системы автоматического управления напряженно-деформационным состоянием конструкции, в которых элементы конструкции представляются преобразователями.
Можно выделить два класса управляемых конструкций:
пространственно-кинематические конструкции (двери и стекла автомобилей, выдвигаемые элементы крыльев самолетов, раскрываемые и выдвигаемые антенны и т.д.). Степень автоматизации управления такими конструкциями велика.
конструкции с управлением напряженно-деформационным состоянием.
В настоящее время методами управления параметрами конструкций уже решается ряд технических задач:
управление прочностью конструкции путем регулирования внутренних усилий, изменяющихся во времени под воздействием нагрузки;
управление жесткостью конструкции, основанное на регулировании деформированного состояния и обеспечивающее заданные перемещения элементов конструкции;
управление устойчивостью;
управление колебаниями, заключающееся в изменении частотных и амплитудных характеристик конструкции в целях гашения колебаний и исключения резонансных явлений;
управление деформациями при технологической обработке материалов;
управление геометрическими формами конструкций.
При управлении параметрами конструкций решаются задачи аккумуляции энергии, транспортирования ее в нужное место, усиления и реализации управляющих воздействий. Энергия может быть получена от внешних и внутренних источников. Эффективным является отбор части энергии внешнего воздействия на конструкцию (ветровой, гравитационной, тепловой и т.д.) для реализации управления НДС. Внутренним источником является потенциальная энергия сжатых и деформируемых элементов конструкции.
Все элементы конструкций могут рассматриваться как преобразователи и связи, преобразующие внешние воздействия в опорные воздействия. Свойства таких механических систем управления в понятиях теории управления могут быть использованы при синтезе и анализе систем управления конструкциями. Рычаги, кулачковые и кривошипные механизмы могут рассматриваться как преобразователи. Функции измерения усилий и перемещений, преобразование и усиление, принятие и реализация управленческих решений осуществляются в конструкциях и механизмах автоматически на основе заранее жестко заложенных в них при проектировании соотношений геометрических и физических параметров.
Методы конструирования и расчета механических систем на базе теории управляемых конструкций нашли применение в автомобилестроении. Они плодотворно используются при проектировании управляемых автомобильных подвесок с пневматическими, гидравлическими и исполнительными электромагнитными механизмами с использованием микропроцессорных устройств управления.