

Регулирование тормозных сил
Торможение автомобиля должно осуществляться с максимальной эффективностью при одновременном сохранении его управляемости и устойчивости. При торможении происходит перераспределение нормальных реакций, действующих на передний и задний мосты, которое зависит от замедления и высоты центра масс автомобиля. По мере роста замедления реакции на передний мост увеличиваются, а на задний - уменьшаются. Наибольшая эффективность торможения достигается при полном использовании сцепного веса автомобиля.
Применяют три вида регулирования распределения тормозных сил по мостам:
постоянное (нерегулируемое);
программное;
регулируемое по отклонению (с обратной связью).
Наибольшее распространение получили программные регуляторы тормозных сил (РТС).
Автоматизация тормозных систем
При автоматизации системы, как правило, должна предусматриваться возможность работы и в режиме непосредственного управления. Для этого в систему устанавливаются переключатели режимов работы. Такие переключатели «водитель - автомат» позволяют при необходимости или при выходе из строя средств автоматизации переходить на ручное управление. Переключение режимов может осуществляться и автоматически. Для этой цели широко используют электромагнитные клапаны (ЭМК). На грузовых автомобилях используются командные системы управления с пневматическим приводом тормозных механизмов.
Принципиальная схема автоматизированной системы управления торможением колес с пневматическим приводом представлена на рис. 6. Приведенная система управления торможением автомобиля имеет три уровня управления: 1) непосредственный от тормозного крана; 2) от локального регулятора тормозных сил; 3) от центрального устройства управления.
Для повышения надежности работы в системе используются два контура с раздельным питанием от двух источников 1, 2. Из ресиверов 1, 2 воздух подается в двухсекционный тормозной кран 3. При нажатии водителем на педаль 3.1 срабатывает верхняя секция 3.2 крана, через которую сжатый воздух поступает в контур задних тормозных механизмов. Повышение давления в верхней секции 3.2 крана заставляет сработать нижнюю секцию 3.3, которая подает сжатый воздух в контур передних тормозных механизмов. В переднем контуре воздух в тормозные камеры 9, 10 поступает через переключатель вида работы 4. В задний контур воздух подается в поршневые тормозные камеры 6, 7 через переключатель 4 и клапан 5.2 регулятора тормозных сил 5. Регулятор служит для автоматического регулирования силы торможения в зависимости от нагрузки на заднюю ось.
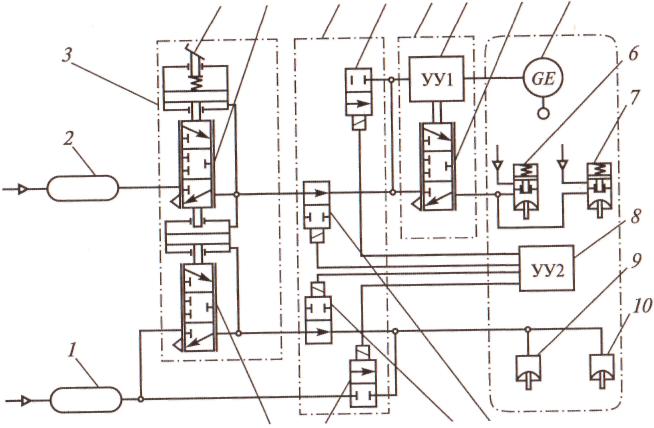
Рис. 6. Принципиальная схема автоматизированной
системы управления торможением колес с пневмоприводом
Нагрузка приводит к изменению положения кузова или рамы автомобиля относительно заднего моста. Это перемещение воспринимается упругим чувствительным элементом датчика 5.3 (GE). Один конец упругого чувствительного элемента связан с поршнем ограничителя, а второй - с задним мостом. По сигналу с датчика устройство управления 5.1 (УУ1) управляет клапаном 5.2, внося коррекцию в закон управления тормозными "силами, что приводит к повышению эффективности торможения. В автоматическом режиме управление осуществляется от устройства управления 8 (УУ2). Изменение режима работы производится с помощью переключателя 4, содержащего четыре электромагнитных клапана, из которых 4.2 и 4.3 - нормально открыты, 4.1 и 4.4 - нормально закрыты. При торможении по командам от УУ2 ЭМК 4.2 и 4.4 закрываются, отсоединяя тормозной кран от контуров питания, и открываются ЭМК 4.1 и 4.3, пропуская сжатый воздух из ресиверов 1, 2 в контуры питания, минуя тормозной кран 3. При автоматическом управлении используется широтно-импульсная модуляция и давление в тормозных камерах регулируется путем изменения длительности включения клапанов. По окончании торможения ЭМК 4.1 и 4.4 закрываются, а ЭМК 4.2 и 4.3 открываются и воздух из контуров питания сбрасывается в атмосферу через тормозной кран 3.
Такая система соответствует концепции минимального изменения конструкции действующих систем торможения. Однако для ее реализации требуются ЭМК с большим проходным сечением, которые имеют небольшое быстродействие и требуют больших токов для переключения.