

2.1.2. Адаптивный регулятор тока с эталонной моделью
При
питании двигателя постоянного тока от
тиристорного преобразователя с раздельным
управлением вентильными группами, при
малых нагрузках на валу двигателя,
возникает прерывистый якорный ток,
когда переходные процессы в якорной
цепи заканчиваются за период пульсации
выпрямленного напряжения, или, другими
словами, в зоне прерывистого тока (ЗПТ)
электромагнитная инерционность якорной
цепи не проявляется и тиристорный
преобразователь снижает коэффициент
усиления. Для сохранения качества
переходного процесса в ЗПТ необходимо
в контуре тока изменять параметры
регулятора в зависимости от режима
работы преобразователя, то есть
использовать адаптивный регулятор тока
(так как преобразователь заходит в
глубокий прерывистый режим, то есть )
)
Адаптивный
регулятор тока при непрерывном якорном
токе имеет стандартную передаточную
функцию пропорционально-интегрального
регулятора (ПИ), а при прерывистом токе
происходит переключение структуры
регулятора на интегральную (И), с
уменьшением в (5-10) раз постоянной
интегрирования .
.
При непрерывном якорном токе передаточная функция регулятора тока имеет следующий вид:
 .
.
При прерывистом якорном токе передаточная функция регулятора тока имеет следующий вид:
 ,
,
где

Структурная схема адаптивного регулятора с эталонной моделью представлена на рисунке 2.2.
Структурная схема адаптивного регулятора с эталонной моделью

Рис. 2.2-Адаптивный регулятор тока с эталонной моделью
где М – эталонная модель,
 - коэффициент
усиления (эталонное значение за вычетом
фактического).
- коэффициент
усиления (эталонное значение за вычетом
фактического).
Передаточная функция эталонной модели имеет следующий вид:

Коэффициент в контуре модели из условий устойчивости работы тиристорного преобразователя и контура тока (для исключения автоколебания) не должен превышать значение:

где
 - граничная скорость.
- граничная скорость.
Применение эталонной модели позволяет:
улучшить свойства САР в режиме прерывистого тока,
при неточной настройке параметров, а так же их нестабильности и
 получить свойства САР близкие к
стандартным,
получить свойства САР близкие к
стандартным,снизить отрицательное влияние внутренней отрицательной обратной связи по ЭДС .
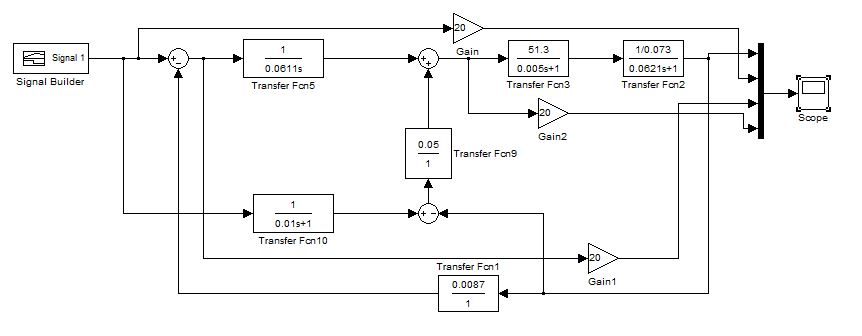
Рис. 2.2.а. - Адаптивный регулятор тока с эталонной моделью в среде Matlab.
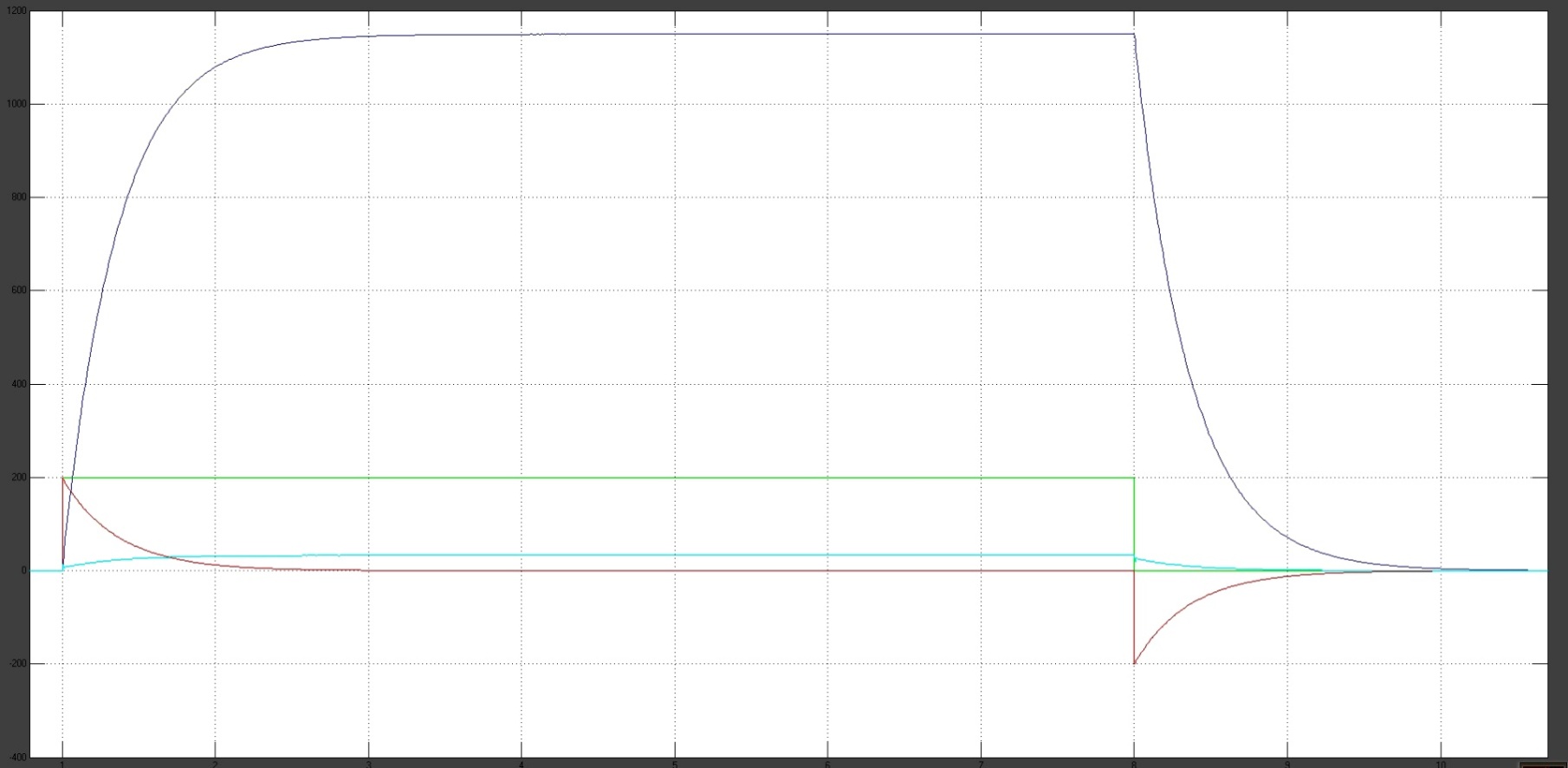
Рис.2.2.б - Осциллограмма Iя с адаптивным регулятором (эталонная модель)
2.1.3. Анализ влияния внутренней обратной связи по эдс двигателя. Компенсация влияния эдс двигателя.
В системе регулирования электроприводом изменение ЭДС двигателя, возникающее при изменении его скорости, является для токового контура возмущением и приводит к отклонению тока якоря от значения, задаваемого входным сигналом. В пуско-тормозных режимах работы это приводит к снижению якорного тока ниже уровня токоограничения. По этой же причине происходит увеличение тока якоря в стопорных режимах, когда момент сопротивления значительно превышает максимально допустимое предельное значение для механизма.
При построении контура регулирования тока внутренняя обратная связь по ЭДС двигателя не учитывается, однако в некоторых случаях она оказывает существенное влияние на работу СУЭП электропривода. На рис. 8 приведена структурная схема контура регулирования тока с учетом внутренней обратной связи по ЭДС двигателя. В этом случае контур регулирования якорного тока становится статическим с коэффициентом передачи в статическом режиме, равном:

Относительная статическая ошибка по току при скачке задания составляет:
п ри
этом возрастает перерегулирование в
токе.
ри
этом возрастает перерегулирование в
токе.
Анализ влияния обратной связи по ЭДС двигателя на свойства СУЭП тока и скорости позволяет сделать следующие выводы:
уменьшается коэффициент передачи замкнутого контура тока, что снижает быстродействие СУЭП и приводит к недоиспользованию двигателя по току;
в режиме токоограничения (регулятор скорости находится в насыщении) происходит увеличение тока выше уровня токоограничения при приложении чрезмерной нагрузки в стопорных режимах;
увеличивается колебательность токового контура;
увеличивается время восстановления скорости при набросе нагрузки;
увеличивается ударное падение скорости.
В курсовом проекте, если относительная ошибка регулирования тока превышает заданную, следует применить дополнительную положительную обратную связь, компенсирующую влияние обратной связи по ЭДС двигателя.
На рис. 8 показан наиболее рациональный вариант компенсирующей обратной связи по ЭДС, которая воздействует непосредственно на ТП (на дополнительный вход суммирующего усилителя адаптивного РТ или на дополнительный вход П-РТ1 двойного регулятора тока). В СУЭП однозонного регулирования скорости в качестве компенсирующего сигнала вместо сигнала по ЭДС двигателя можно использовать сигнал обратной связи по скорости Uос, тогда передаточная функция компенсирующего звена будет равна:


Анализируется переходный процесс якорного тока во времени при отсутствии внутренней обратной связи по ЭДС двигателя, определяется ошибка регулирования якорного тока, сравнивается с заданной.
Рисунок 2.3 а - Схема с влиянием внутренней обратной связи по ЭДС двигателя, собранная в Matlab.
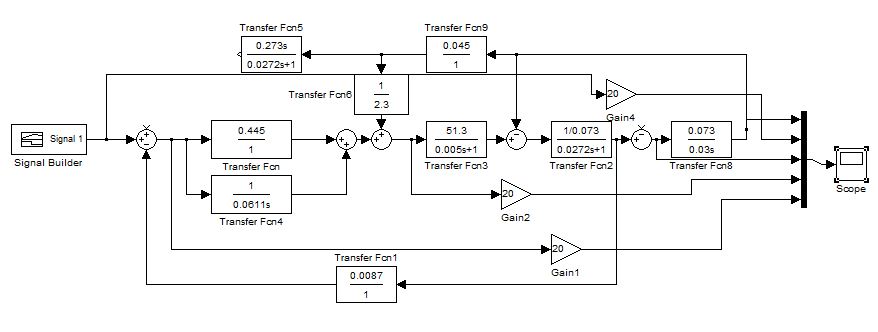

Рисунок 2.3 б-
Зависимость
 с обратной связью по ЭДС (Общий вид)
с обратной связью по ЭДС (Общий вид)

Рисунок 2.3 б- Зависимость с обратной связью по ЭДС
Определим величину относительной ошибки по току от действия ЭДС двигателя и сравним ее с указанной допустимой ошибкой.
Относительная величина недоиспользования двигателя по току в %

Анализируется переходный процесс якорного тока во времени при наличии обратной связи по ЭДС двигателя, определяется ошибка регулирования якорного тока, сравнивается с заданной, на основании чего делается вывод о необходимости компенсации влияния ЭДС двигателя на работу токового контура.