

25. Определение реакции в промежуточном шарнире
Для определения в группе Ассура 2-3 реакции R23 звена 2 на звено 3 необходимо:
1 )выписать
уравение равновесия сил для звена 3
)выписать
уравение равновесия сил для звена 3
В
этом уравнении единственной неизвестной
является сила R23.
Поэтому на плане сил, построенном ранее
соединяем отрезок между силами R43
и
 по
правилу силового треугольника .
по
правилу силового треугольника .
2) выписать уравнения равновесия сил для звена 2

Отсюда
тем же методом находим
 .
и
.
и
 на
плане сил будет одним и тем же отрезком.
на
плане сил будет одним и тем же отрезком.
26.Принцип Даламбера, силы и моменты сил инерции (пример их определения).
Метод кинетостатики основан на принципе Даламбера: если ко всем внешним силам, действующим на звенья механизма, добавить силы инерции и моменты сил инерции, то данный механизм будет находиться в состоянии статического равновесия. То есть это искусственный прием, приводящий неравновесную систему в состояние равновесия.
Силы инерции и моменты сил инерции возникают при изменении скорости движения звеньев. Силы инерции препятствуют движению при ускорении и способствуют ему при замедлении. Формулы для определения:
силы инерции звена
Fui=-mi⋅asi;
момента сил инерции
Mui=-Isi⋅εi
где
mi – масса звена;
Isi – центральный момент инерции;
asi – ускорение центра масс звена.
Знак «-» показывает, что вектор Fui направлен против вектора ускорения asi (определяют из плана ускорений), а Mui – против углового ускорения i - го звена.
27.Задачи динамического анализа механизма
Основными задачами динамики механизмов являются:
1) определение сил, действующих в кинематических парах механизма;
2) определение сил трения и их влияние на работу механизма;
3) определение закона движения механизма, находящегося под действием определенных сил;
4) выявление условий, обеспечивающих заданный закон движения механизма;
5) уравновешивание механизмов.
Для решения первой задачи проводится силовое исследование механизма
28. Динамический анализ рычажных механизмов. Цели и задачи.
Задачи:
а) изучение влияния внеш.сил, сил веса звеньев, сил трения и массовых сил(инерции) на звенья механизма, на элементы звеньев, на кинематические пары, стойки и установление способов уменьшения динамических нагрузок, возникающих при движении
б) изучение режима движения механизма под действием заданных сил и установление способов, обеспечивающих заданные режимы движения механизмов
Цели:
1) определение внешних неизвестных сил, действующих на звенья механизма, а также реакций, возникающих в кинематических парах при движении механизма
2) определение мощности, необходимой для воспроизведения заданного движения механизма и изучение законов распределения мощности на выполнение работ
29. Режимы движения машины
Работу машины можно разбить на 3 периода:
- период разбега; период установившегося движения; период выбега;
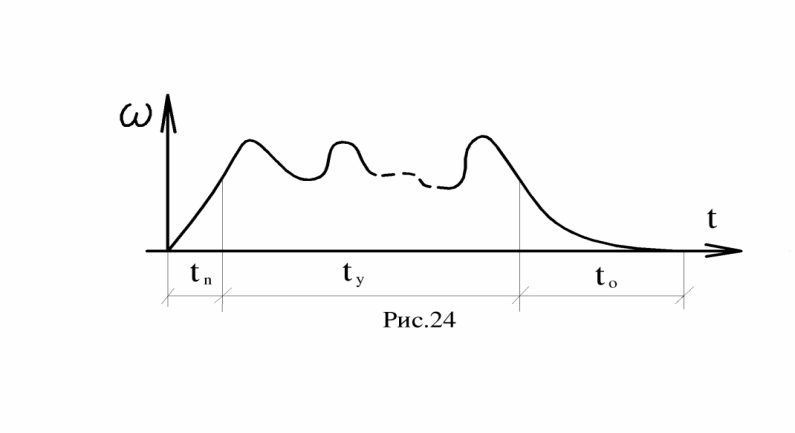
Аналитическая зависимость между действующими на звенья силами и кинематическими параметрами движения называется уравнением движения. Это уравнение в общем случае имеет вид ∆Т=Ад-Ас, где ∆Т=Т-Т0 – изменение кинетической энергии за рассматриваемый промежуток времени (Т и Т0 – величина кинетической энергии в конце и начале промежутка);
Ад-Ас – суммарная работа действующих сил за рассматриваемый промежуток (Ад, Ас – работа движущих сил и сил сопротивления).
В период разбега Ад-Ас=∆Т>0, т.е. происходит ускорение движения звеньев, являющегося неустановившемся.
В период установившегося движения Ад-Ас=∆Т=0, т.е. скорости звеньев в конечный и начальный моменты цикла равны и вся работа движущихся сил расходуется на преодоление сопротивлений.
В период выбега Ад-Ас=∆Т<0, движение продолжается некоторое время за счет накопленной кинетической энергии, поглощаемой за счет сопротивления движению.