

Некоторые вопросы теории сар.
Переходные процессы в САР
Понятие устойчивости САР
Показатели качества регулирования
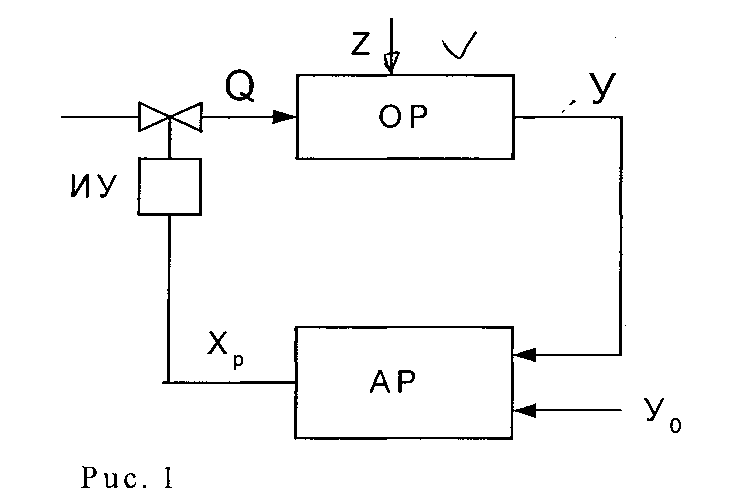
Структурная схема системы автоматического регулирования.
ОР - объект регулирования,
ИУ- исполнительное устройство,
Y-регулируемый параметр,
Д – датчик, измеряет Y и преобразует в стандартный сигнал,
Yo-параметр заданный опрератором
Переходные процессы в сар.
Переходный процесс – изменение регулирования параметра Y по времени в случае скачкообразного (резкого) изменения хода.
В системе регулирования возможны 2 входных воздействия:
Изменение задания изменения Y0
Изменение возмущения Z
Существуют два вида переходных процессов:
По заданию
По возмущению
Переходные процессы по заданию


t
В момент t=t1 возникло рассогласование, ПЛК начинает приводит y=y0 ,это осуществимо 2 путями:
1-апериодичным переходным процессом
2-сходящимся колебательными переходными процессами
Переходные процессы по возмущению

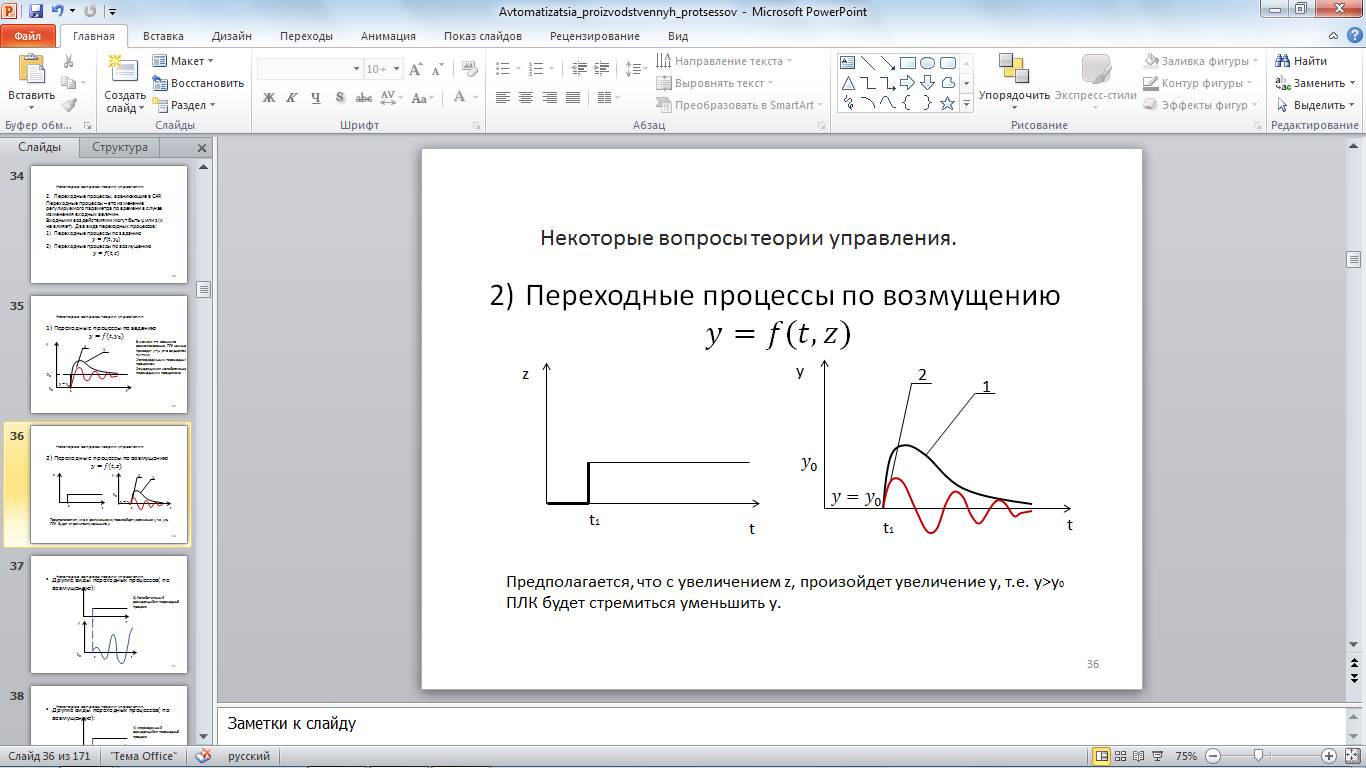
Предполагается, что с увеличением z, произойдет увеличение у, т.е. у>y0 ПЛК будет стремиться уменьшить у.
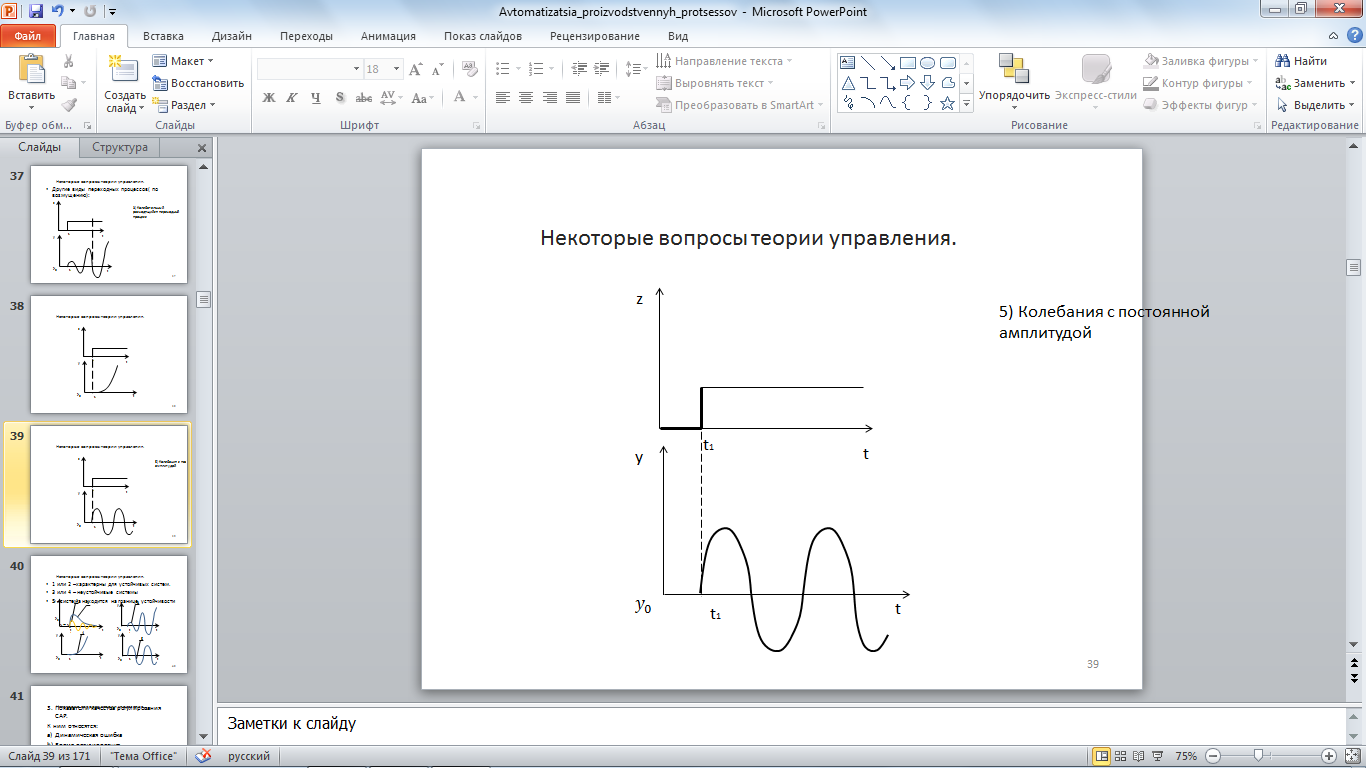
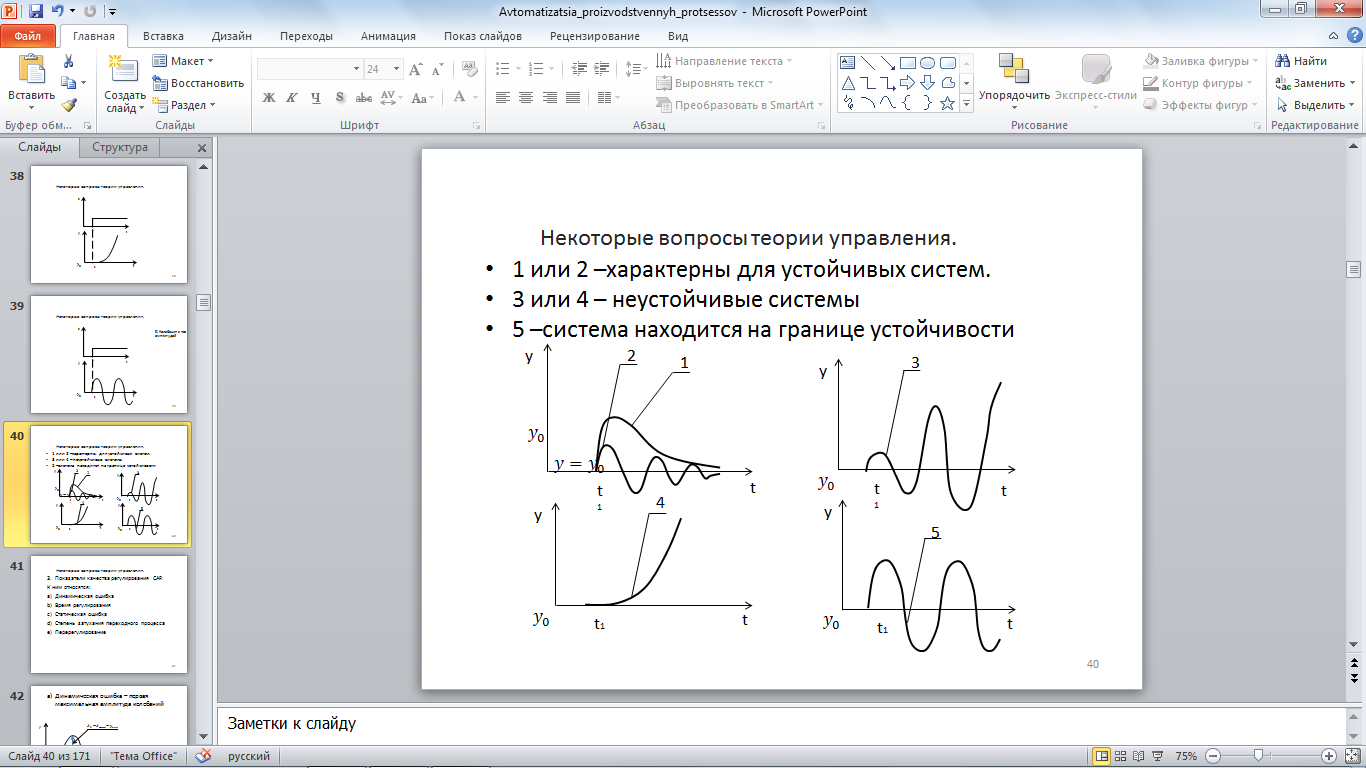
Другие виды переходных процессов (по возмущению):
Колебательный расходящийся переходный процесс

Апериодичный расходящийся переходный процесс

Колебания с постоянной амплитудой\
Понятие устойчивости сар.
Система считается устойчивой, если, будучи выведенной из состояния равновесия, она с течением времени придет в установившееся состояние. Понятие устойчивости САР сформулировал Ляпунов.
 Условие
устойчивости – первое необходимое
условие.
Условие
устойчивости – первое необходимое
условие.
Показатели качества регулирования
При создании САР после определения устойчивости системы регулирования определяют показатели качества регулирования (базируются, как правило, на понижении технического процесса).
К показателям качества регулирования:
Время регулирования
Динамическая ошибка
Систематическая ошибка
Степень затухания переходного процесса
Перерегулирование
Время регулирования
Считается, что переходный процесс закончен, когда параметр входит в трубку точности.

Время регулирования – это время от начала изменения параметра до первого момента вхождения параметра в трубку точности и невыхода из нее.
Динамическая ошибка – это максимальное отклонение параметра от задания, это первая максимальная амплитуда.
yдин = A1 = Amax

Статическая ошибка – это отклонение параметра от задания в установившемся режиме.

Степень затухания переходного процесса
 ,
где A3
–
вторая положительная амплитуда
,
где A3
–
вторая положительная амплитуда

Перерегулирование – отношение второй амплитуды к первой, выраженная в процентах.


При построении САР задается степень затухания для того, что бы получить определенный переходный процесс.
Как правило, ψ = 0,75÷0,9. в этом случае получают затухающий колебательный процесс.
Статистическая ошибка должна быть равна нулю – точное регулирования.
Динамическая ошибка должна быть минимальна.
Показатели качества регулирования определяются:
Свойствами объекта
Техническими средствами автоматизации
Менять показатель качества позволяет контроллер.
ПЛК вырабатывает законы регулирования - зависимость выхода от его входа:

где

Лекция №4.
Существуют следующие законы регулирования:
Пропорциональный закон (П-закон);
Пропорционально-интегральный закон (ПИ-закон);
Пропорционально-интегрально-дифференциальный закон (ПИД-закон).