

Построение структурной схемы системы управления ск
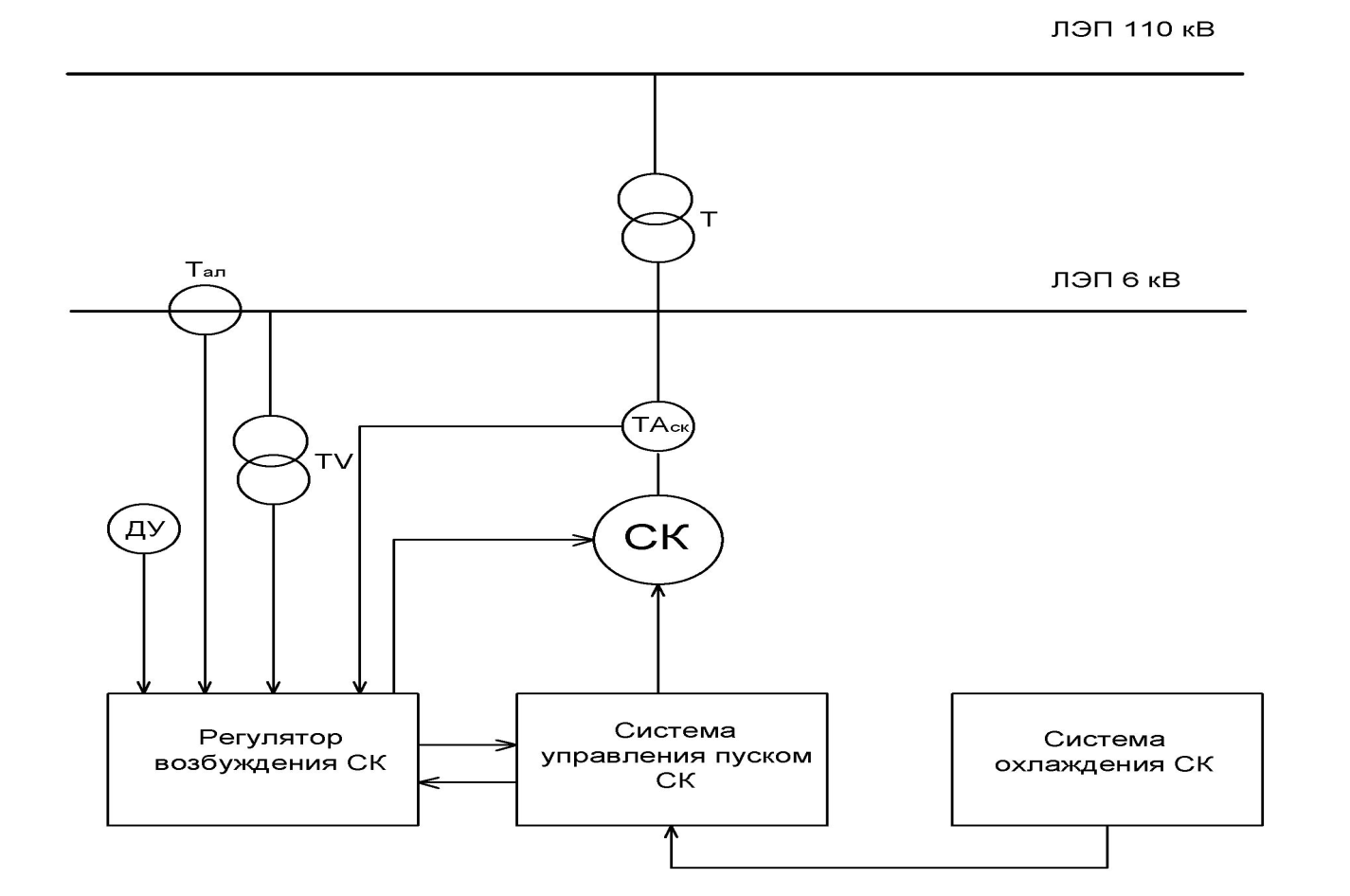
Рис.1.4 Структурная схема системы управления СК.
Рассмотрим подробнее структурную схему:
СК- синхронный компенсатор; ТАск- трансформатор тока СК; ТАл- трансформатор тока линии; Т- силовой трансформатор; TV- измерительный трансформатор напряжения; ДУ- датчик углового положения ротора СК.
система охлаждения обеспечивает температурный режим обмоток и магнитопроводов СК. В нашем случае система охлаждения двухконтурная (первый контур водородный, второй водяной). При отказе системы охлаждения начинает работу система аварийного отключения;
система управления пуском предназначена для пуска (как правило пуск СК производится в асинхронном режиме) СК;
регулятор возбуждения предназначен для управления величиной токов возбуждения в обмотках ротора с целью обеспечения максимального значения cosφ в ЛЭП и обеспечения устойчивости работы СК.
Алгоритм функционирования автоматического регулятора
Т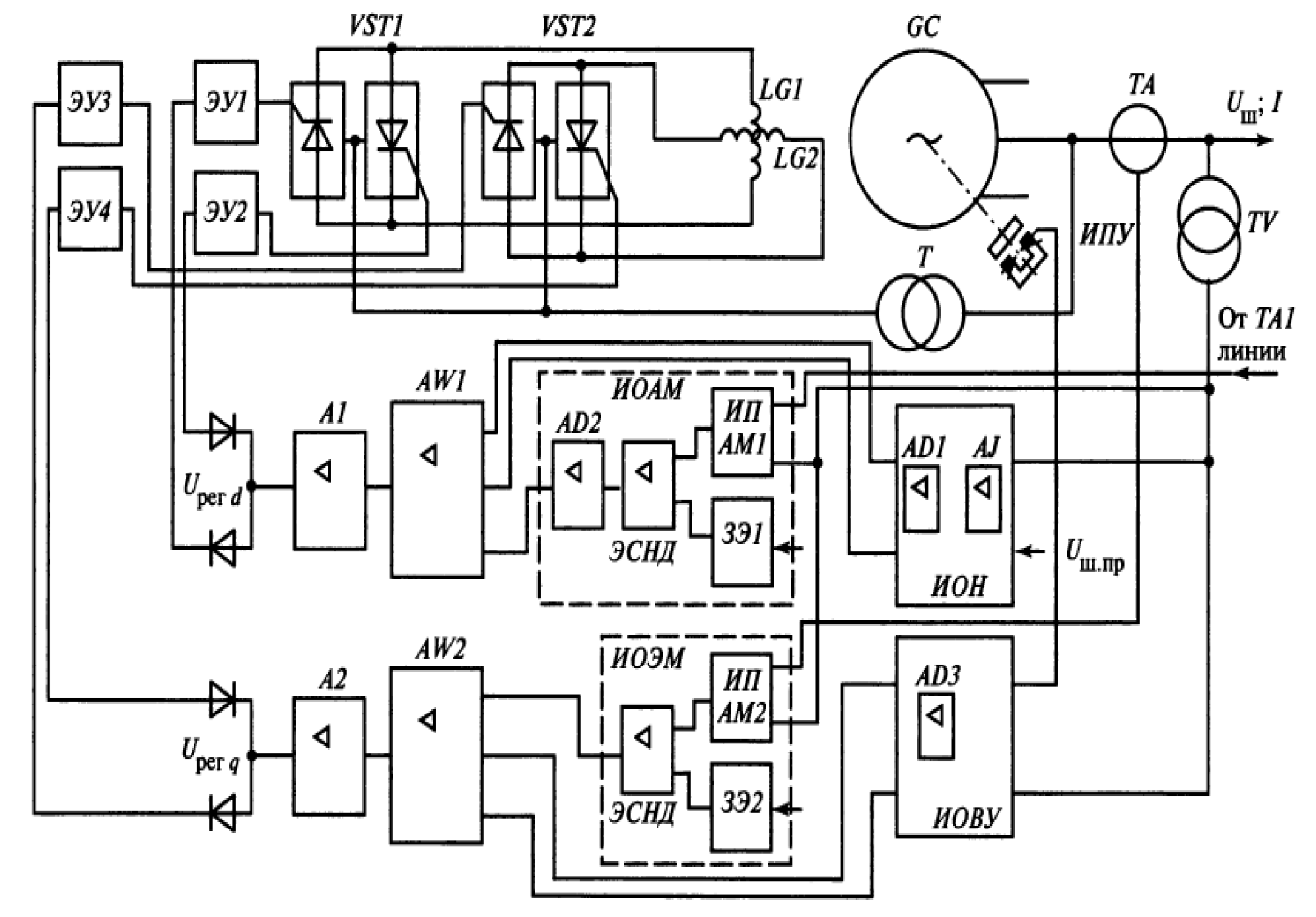 еперь
рассмотрим как же на самом деле происходит
процесс функционирования автоматические
регулятора.
еперь
рассмотрим как же на самом деле происходит
процесс функционирования автоматические
регулятора.
Рис. 1.5 Функциональная схема автоматической системы регулирования возбуждения синхронного компенсатора с поперечной обмоткой ротора
Реверсивное изменение возбуждения СК с продольной LG1 и дополнительной (удерживающей) обмоткой ротора LG2, расположенной по поперечной его оси, создается двумя тиристорными возбудителями VST1, VST2 (рис. 1.5), состоящими каждый из двух встречно включенных тиристорных выпрямителей, подключенных через трансформатор Т к выводам обмоток статора и управляемых двумя автоматическими регуляторами возбуждения АРВ-d и АРВ-q.
Алгоритмы функционирования автоматических регуляторов определяются их назначением. Регулятор АРВ-d обеспечивает поддержание напряжения на шинах Uш путем изменений генерируемой или потребляемой СК реактивной мощности. На него возлагается и задача демпфирования качаний синхронных генераторов электростанций путем создания принудительных колебаний напряжения на шинах с частотой колебаний роторов генераторов с фазой, обеспечивающей эффективное их затухание.
Это достигается использованием сигнала по изменениям активной мощности в линии электропередачи, формируемого реальным дифференцирующим звеном. Регулирующее воздействие U d определяется суммой сигналов, отображающих отклонение напряжения AU =Um - ишпр9 производную напряжения и изменение мощности АТл. В операторной форме алгоритм автоматического регулирования
![]() (1.8)
(1.8)
Сигнал, формируемый по производной напряжения, стабилизирует автоматическую систему регулирования возбуждения по продольной оси, т.е. предотвращает ее переход в неустойчивый автоколебательный режим, при обычно весьма высоких значениях коэффициента усиления сигнала по отклонению напряжения 100).
Алгоритм автоматического регулирования возбуждения по поперечной оси определяется его назначением, состоящим: в удержании ротора в положении по продольной оси, т.е. при угле 8 = 0, в режиме потребления реактивной мощности при отрицательном токе возбуждения в продольной обмотке возбуждения LG1; в демпфировании колебаний ротора в этом режиме искусственной устойчивости СК. Поэтому регулятором АРВ-# используются сигналы по отклонению угла А8 от 8 = 0, его производной и отклонению (появлению) электромагнитного момента — активной мощности АР на валу СК. В операторном виде алгоритм автоматического регулирования
![]() (1.9)
(1.9)
Автоматические регуляторы АРВ-d и АРВ-q содержат соответствующие алгоритмам (1.8) и (1.9) измерительные органы (см. рис. 1.5): напряжения ИОН с дифференциатором AD1; активной мощности линии ИОАМ с реальным [с постоянной времени Т — см. (4.7)] дифференциатором AD2; угла положения ротора ИОУ9 подключенного к ИПУ и TV (см. рис. 4.5, г) с дифференциатором AD3 и электромагнитного момента ИОЭМ на валу СК с элементом сравнения непрерывного действия ЭСНД. Измерительные органы ИОАМ и ИОЭМ содержат измерительные преобразователи мощности линии ИПАМ1 и синхронного компенсатора ИПАМ2, подключенные к измерительным трансформаторам TV, ТА1 и ТА соответственно; задающие элементы ЗЭ1, ЗЭ2 устанавливают сигналы, отображающие установленную передаваемую мощность по линии и мощность СК, определяемую главным образом его вентиляцией.
Измерительные части регуляторов выполняются на интегральных микросхемах: ИОН с использованием управляемых интеграторов AJ, как и в микроэлектронном аналоговом АРВ СДП синхронных генераторов (см. рис. 3.10), а измерительный орган внутреннего угла ИОВУ аналогично описанному измерительному органу автоматического регулятора знакопеременного возбуждения СК без поперечной обмотки (см. рис. 4.4).
После суммирования сигналов измерительных органов интегральными сумматорами AW1, AW2 сигналы преобразуются исполнительными усилителями Al, А2 в регулирующие воздействия UpQrd, UpQrq на элементы управления ЭУ1—ЭУ4 тиристорами возбудителей через разделительные диоды.