

Основы регулирования синхронного компенсатора
Синхронный компенсатор (СК) — традиционный генератор реактивной мощности, используется в современных энергосистемах и как ее управляемый потребитель.
Режим генерирования (выдачи) или потребления определяется возбуждением СК. В соответствии с U-образной его характеристикой (рис. 1,а) при номинальном режиме возбуждении синхронный компенсатор выдает реактивную мощность:
Qск.ном=
 (1.1)
(1.1)
-при отсутствии возбуждения (JВ=0) — потребляет реактивную мощность
|-
Qск.ном|= ≈ 0.5 Qск.ном
. (1.2)
≈ 0.5 Qск.ном
. (1.2)
Наибольшая возможная загрузка СК потребляемой реактивной мощностью достигается
-при граничном отрицательном токе возбуждения — Iв.гр.
-при отсутствии возбуждения (IВ = 0) и внутреннем угле компенсатора δ=π/2, т.е. при расположении ротора по поперечной оси.
При этом получаем следующее уравнение:
|-
Qск.гр|= ≈ 0.75 Qск.ном
. (1.3)
≈ 0.75 Qск.ном
. (1.3)
Основная рабочая задача СК в сохранение синхронизма, а так как наибольшая возможная загрузка СК потребление реактивной мощьности достигается в граничном режиме, то и сам граничный режим потребления реактивной мощности будет определятся условием устойчивости работы СК и обусловлен синхронизирующим вращающим моментом создаваемым синхронным электромагнитным Мс и реактивным Мр моментами (обусловленным явнополюсностью) [4].
Mc
=
 sinδ
sinδ
Mp=
 ∙
∙ sin2δ . (1.4)
sin2δ . (1.4)
В частности, при отсутствии возбуждения СК удерживается в синхронизме только за счет реактивного момента Мр.
П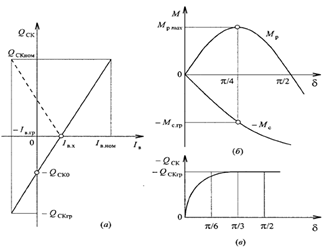 ри
отрицательном возбуждении синхронный
момент Мс
противодействует реактивному и ухудшает
устойчивость работы СК: отрицательное
возбуждение уменьшает Xd,
снижая
эффект явнополюсности [1].
ри
отрицательном возбуждении синхронный
момент Мс
противодействует реактивному и ухудшает
устойчивость работы СК: отрицательное
возбуждение уменьшает Xd,
снижая
эффект явнополюсности [1].
Рис.1. Характеристики синхронного компенсатора: а — идеальная U-образная характеристика; б — зависимость вращающих моментов от положения ротора; в— зависимости потребляемой реактивной мощности от угла
Теперь рассмотрим граничное значение, отрицательной Едгр .Для этого прировняем к нулю синхронизирующий момент с учетом угла δ и формулой (1.4) производной по этому углу.
Получим следующее выражение:
 (Mc
+ Mp)
≈
cosδ
+
(Mc
+ Mp)
≈
cosδ
+
 ∙
cos2δ
= 0
. (1.5)
∙
cos2δ
= 0
. (1.5)
При δ = 0
-Eqгр=
Uш
 = Uш
= Uш
 . (1.6)
. (1.6)
Из данной выведенной формулы следует, что при отрицательном возбуждении наибольшая потребляемая реактивная мощность —Qск.гр теоретически достигается в граничном режиме при δ = 0. Практически, в связи с наличием потерь активной мощности (на вентиляцию, трение) мощность — Qск.гр достигается при угле δ " π/10 (рис. 1,в).
В граничном режиме СК выпадает из синхронизма. Согласно (1.4) и рис. 1,б при δ = π/4 моменты равны
|- Mc.гр|= Mp.max , (1.7)
а при δ > π/4 синхронизирующий момент отрицательный.
Даже при отсутствии отрицательного возбуждения угол δ > π/4 увеличивается, поскольку реактивный момент уменьшается. При δ=π/2, т.е. при положении ротора по поперечной оси, сопротивление статора равно Xq, и потребляемая мощность достигает наибольшего значения (1.3) при отсутствии возбуждения (JВ=0). На такой режим возможен только в условиях искусственной устойчивости СК [3].