

Скорости и ускорения точек вращающегося тела 1-9
Скорость точки будет равна
 или
или
 .
.
Эту скорость называют линейной или окружной скоростью точки.
Она всегда направлена по касательной к окружности, описываемой
точкой М. Так как для всех точек тела ω одинакова, то скорости
точек пропорциональны расстояниям от оси вращения.
Для определения ускорения точки воспользуемся формулами
 .
.
Используя формулу (7) и учитывая, что ρ=h , найдем

Касательное ускорение направлено всегда по касательной к
траектории (окружности); нормальное ускорение – по радиусу к
оси вращения (рис. 3).
Полное
ускорение точки

Плоско-параллельное движение твердого тела. Разложение движения на поступательное и вращательное 2-13
Плоским движением твердого тела называется такое
движение, при котором все его точки движутся в плоскостях,
параллельных данной неподвижной плоскости n.
|
|
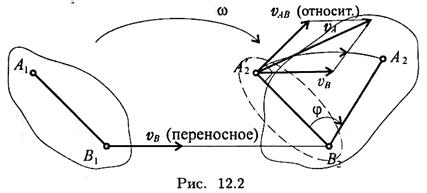
Разложение используют для определения скорости любой точки тела, применяя теорему о сложении скоростей (рис. 12.2).
Точка А движется вместе с точкой В, а затем поворачивается вокруг В с угловой скоростью и, тогда абсолютная скорость точки А будет равна
vA = vB + vAB, vAB = ωr (r = АВ).
П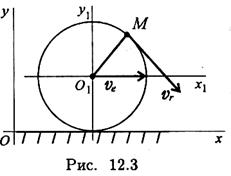 римером
плоскопараллельного движения может
быть движение колеса на прямолинейном
участке дороги (рис. 12.3).
римером
плоскопараллельного движения может
быть движение колеса на прямолинейном
участке дороги (рис. 12.3).
Скорость точки М
vM=ve + vr,
ve — скорость центра колеса переносная; vr — скорость вокруг центра относительная.
уОх — неподвижная система координат,
y101x1 — подвижная система координат, связанная с осью колеса.
Теорема об определении скоростей точек плоской фигуры 2-12
Скорость любой точки плоской фигуры равна геометрической сумме скорости выбранного полюса и скорости точки во вращательном движении фигуры вокруг полюса.
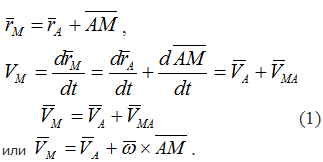
Производная от вектора AM, постоянного по величине и переменного по направлению, численно равна скорости точки М при вращении ее вокруг точки А.
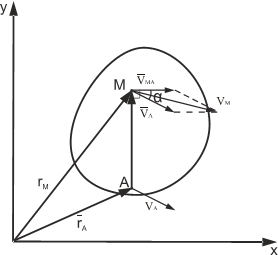
Рис. 1.3
Вектор VMA= ω⋅AM перпендикулярен отрезку АМ.
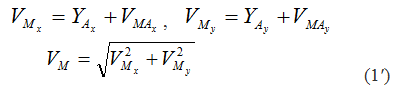
Численную величину скорости точки М можно получить, если воспользоваться теоремой косинусов
![]()
или спроецировать векторное равенство (1) на выбранные оси координат
Мгновенный центр скоростей. Свойства и методы его определения 1-7
Мгновенным центром скоростей называется точка плоской фигуры, скорость которой в данный момент времени равна нулю.
Пусть
в момент времени t
точки А
и В
плоской фигуры имеют скорости
![]() и
и
![]() ,
не параллельные друг другу (рис.33). Тогда
точка Р,
лежащая на пересечении перпендикуляров
Аа
к вектору
и Вb
к вектору
,
и будет мгновенным центром скоростей
так как
,
не параллельные друг другу (рис.33). Тогда
точка Р,
лежащая на пересечении перпендикуляров
Аа
к вектору
и Вb
к вектору
,
и будет мгновенным центром скоростей
так как
![]() .
.
Рис.33
Если
теперь в момент времени
![]() взять точку Р
за полюс, то скорость точки
А
будет
взять точку Р
за полюс, то скорость точки
А
будет![]() ,
так как
.Следовательно,
скорости точек плоской фигуры определяются
в данный момент времени так, как если
бы движение фигуры было вращением вокруг
мгновенного центра скоростей. При этом
,
так как
.Следовательно,
скорости точек плоской фигуры определяются
в данный момент времени так, как если
бы движение фигуры было вращением вокруг
мгновенного центра скоростей. При этом
![]()
![]()
Из
равенств, следует еще, что
![]() точек плоской
фигуры пропорциональны их расстояниям
от МЦС.
точек плоской
фигуры пропорциональны их расстояниям
от МЦС.
Полученные результаты приводят к следующим выводам.
1. Для определения мгновенного центра скоростей надо знать только направления скоростей и каких-нибудь двух точек А и В плоской фигуры (или траектории этих точек);
2. Для определения скорости любой точки плоской фигуры, надо знать модуль и направление скорости какой-нибудь одной точки А фигуры и направление скорости другой ее точки В.
3.
Угловая скорость
![]() плоской фигуры равна в каждый данный
момент времени отношению скорости
какой-нибудь точки фигуры к ее расстоянию
от мгновенного центра скоростей Р:
плоской фигуры равна в каждый данный
момент времени отношению скорости
какой-нибудь точки фигуры к ее расстоянию
от мгновенного центра скоростей Р:
![]() .
.