Статика
Основные понятия и задачи статики 1-11
Статика – это раздел теоретической механики, в которой
изучаются методы эквивалентных преобразований систем сил и
определяются условия равновесия сил, приложенных к твердому телу.
Силой называется векторная величина, являющаяся мерой
механического воздействия одного материального тела на другое.
Прямая линия, вдоль которой направлена сила, называется линией
действия силы.
Системой сил называется совокупность сил, действующих на твердое
тело.Силы, действующие на данное тело или систему тел, можно
разделить на внешние – силы, силы, действующие на данную
систему со стороны других тел, не входящих в рассматриваемую
систему, и внутренние – силы, с которыми действуют друг на
друга тела, входящие в рассматриваемую
систему. В статике излагается учения о силах и условиях
равновесия тел под действием сил.
Две системы сил эквивалентны между собой, если не нарушая состояние тела одну сис-му сил можно заменить другой. Сила эквивал. данной сис-ме сил назыв равнодействующей.
Аксиомы статики и их следствия 1-3
Аксиома 1. Если на свободное твердое тело действуют две силы, то
тело может находиться в равновесии только тогда, когда эти силы
равны по модулю, действуют по одной прямой в противоположные
стороны.
Аксиома 2. Действие данной системы сил на абсолютно твердое
тело не изменяется, если к ней добавить или от нее отнять
уравновешенную систему сил.
Аксиома 3. При всяком действии одного материального тела
на другое со стороны другого тела имеется противодействие, такое
же по величине, но противоположное по направлению.
Аксиома 4. Две силы, приложенные к твердому телу в одной
точке, имеют равнодействующую, приложенную в той же точке и
изображаемую диагональю параллелограмма, построенного на этих
силах как на сторонах.
Аксиома 5. Механическое состояние не изменится, если освободить
ее от связей, приложив к точкам системы силы, равные реакциям
связей. Эту аксиому называют аксиомой о связях.
Виды связей и их реакции
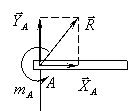
Тело называется свободным, если его перемещение в пространстве ничем не ограничено. В противном случае тело называется несвободным, а тела, ограничивающие перемещения данного тела, называется связями. Силы, с которыми связи действуют на данное тело, называются реакциями связей. Основные виды связей и их реакции: 1. Гладкая поверхность (без трения): Реакция гладкой поверхности направлена по нормали к этой поверхности (перпендикулярна общей касательной).
![]() 2.
Опорная точка
(ребро):
Реакция перпендикулярна
опирающейся поверхности.
2.
Опорная точка
(ребро):
Реакция перпендикулярна
опирающейся поверхности.
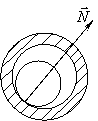
![]() 3. Идеальная
нить (гибкая,
невесомая, нерастяжимая):
Примеры:
моделирует трос, канат, цепь,
ремень,…
3. Идеальная
нить (гибкая,
невесомая, нерастяжимая):
Примеры:
моделирует трос, канат, цепь,
ремень,…
![]() Реакция
идеальной нити направлена по нити к
точке подвеса.
4. Идеальный
стержень
(жесткий, невесомый стержень, на концах
которого шарниры):
Реакция
связи направлена по стержню.
В отличие
от нити стержень может работать и на
сжатие.
Реакция
идеальной нити направлена по нити к
точке подвеса.
4. Идеальный
стержень
(жесткий, невесомый стержень, на концах
которого шарниры):
Реакция
связи направлена по стержню.
В отличие
от нити стержень может работать и на
сжатие.
![]() 5.
Цилиндрический шарнир:
Такая
связь позволяет телу перемещаться вдоль
оси. Положение этой реакции не определено,
но она может быть представлена двумя
взаимно перпендикулярными составляющими
5.
Цилиндрический шарнир:
Такая
связь позволяет телу перемещаться вдоль
оси. Положение этой реакции не определено,
но она может быть представлена двумя
взаимно перпендикулярными составляющими
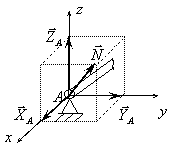
 6. Сферический
шарнир:
Такая
связь не дает точке закрепления тела
перемещаться ни в одном из направлений.
Положение реакции не определено, но
она может быть представлена тремя
взаимно перпендикулярными составляющими.
6. Сферический
шарнир:
Такая
связь не дает точке закрепления тела
перемещаться ни в одном из направлений.
Положение реакции не определено, но
она может быть представлена тремя
взаимно перпендикулярными составляющими.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7. Подпятник: Реакция данной связи задается аналогично предыдущему случаю
.
 8. Жесткая
заделка:
Такая
связь препятствует перемещению и
повороту вокруг точки закрепления.
Контакт тела со связью осуществляется
по поверхности. Имеем распределенную
систему сил реакции, которая, как будет
показано, может быть заменена одной
силой и парой сил.
8. Жесткая
заделка:
Такая
связь препятствует перемещению и
повороту вокруг точки закрепления.
Контакт тела со связью осуществляется
по поверхности. Имеем распределенную
систему сил реакции, которая, как будет
показано, может быть заменена одной
силой и парой сил.
|
|
|
|
|
|
|
|
|
|
||