

Задача 1
О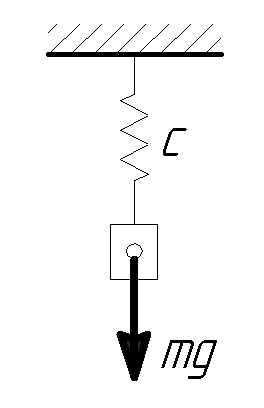 пределить
период свободных вертикальных колебаний
груза массой m = 80 кг, который
прикреплен к пружине с коэффициентом
жесткости с = 2 кН/м.
пределить
период свободных вертикальных колебаний
груза массой m = 80 кг, который
прикреплен к пружине с коэффициентом
жесткости с = 2 кН/м.
Решение
Период колебаний
определим по формуле:
![]() ,
,
где k – угловая частота свободных вертикальных колебаний:
![]() с-1
с-1
![]() с.
с.
Ответ:
![]() с.
с.
Задача 2
О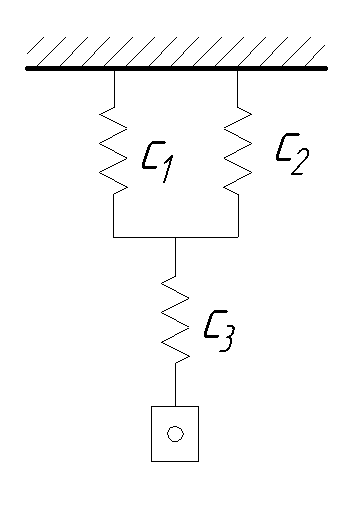 пределить
угловую частоту свободных вертикальных
колебаний груза массой m = 2 кг,
если коэффициенты жесткости пружин
с1 = с2 = с3 = 300 Н/м.
пределить
угловую частоту свободных вертикальных
колебаний груза массой m = 2 кг,
если коэффициенты жесткости пружин
с1 = с2 = с3 = 300 Н/м.
Решение
Угловая частота
свободных вертикальных колебаний:
![]() ,
,
где
![]() – эквивалентная
жесткость системы пружин.
– эквивалентная
жесткость системы пружин.
Так как система
состоит из пружин соединенных и
последовательно и параллельно, то
определим вначале эквивалентную
жесткость параллельно соединенных
пружин с12:
![]() Н/м;
Н/м;
Далее определим последовательное соединение пружин:
![]() ;
; ![]() ;
; ![]() Н/м.
Н/м.
![]() с-1.
с-1.
Ответ:
![]() с-1.
с-1.
4. Основное уравнение динамики относительного движения.
До сих пор изучалось движение материальной точки по отношению к инерциальной системе отсчета, т. е. системы отсчета, где справедливы законы Ньютона. Во многих случаях задачи динамики сводятся к исследованию движения в той или иной неинерциальной системе. Рассмотрим движение точки по отношению к подвижной системе отсчета
Основное уравнение динамики относительного движения материальной точки будет иметь вид
![]() ,
(4.1)
,
(4.1)
где
![]() – ускорение точки относительно подвижной
системы отсчета
– ускорение точки относительно подвижной
системы отсчета
Относительное
движение материальной точки происходит
под действием приложенных к точке сил,
при условии, что к ним присоединены
переносная![]() и Кориолисова
и Кориолисова
![]() силы инерции.
силы инерции.
При этом переносная
и Кориолисова силы инерции – это векторы,
численно равные произведению массы
точки на ее
![]() переносное и
переносное и
![]() Кориолисово ускорения. Направление сил
инерции противоположно направлению
одноименных им ускорений.
Кориолисово ускорения. Направление сил
инерции противоположно направлению
одноименных им ускорений.
Условие относительного
покоя можно получить из основного
уравнения динамики относительного
движения материальной точки путем
подстановки в указанное уравнение
нулевых значений
![]() и
:
и
:
![]() , (4.2)
, (4.2)
Примеры решения задач
Задача 1
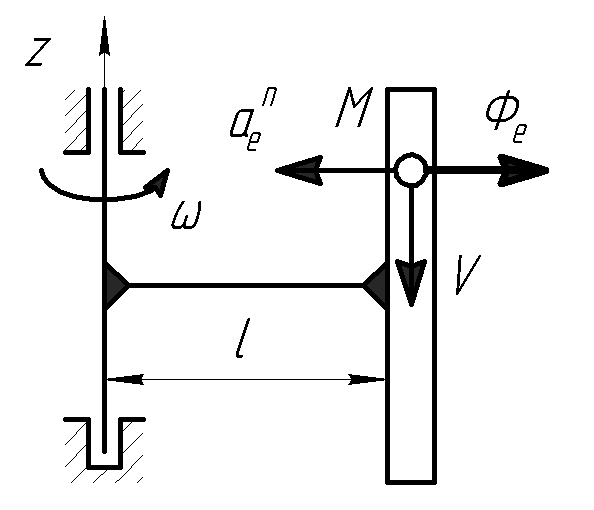
Шарик М массой
m = 0.2 кг движется
со скоростью V = 19.62
м/с относительно вертикальной трубки,
которая на расстоянии l = 0.5 м
прикреплена к вертикальному валу 1. Вал
вращается с постоянной угловой скоростью
![]() рад/с. Определить переносную силу
инерции шарика.
рад/с. Определить переносную силу
инерции шарика.
Решение
Переносная сила
инерции может быть рассчитано согласно
формулы:
![]() ,
Определим переносное ускорение точки.
,
Определим переносное ускорение точки.
Так как переносным
движением является вращение трубки
вокруг оси Z, то переностным
движением точки является движение по
окружности радиуса
![]() .
При этом ускорение точки можно разложить
на два ускорения (
.
При этом ускорение точки можно разложить
на два ускорения (![]() и
и
![]() ),
т.е.:
),
т.е.:
![]() ;
;
![]() м/с2;
м/с2;
![]() ;
;
![]()
![]() м/с2.
м/с2.
![]() м/с2;
м/с2;
![]() Н.
Н.
Ответ:
![]() .
.
Задача 2
Штатив с математическим
маятником движется по наклонной плоскости
вниз с ускорением
![]() .
Определить угол
.
Определить угол
![]() в положении относительного покоя шарика,
если угол
в положении относительного покоя шарика,
если угол
![]() .
.
Решение
Запишем основное
уравнение динамики относительного
покоя
![]() .
.
Спроецируем это
уравнение на ось Х и Y,
при этом учтем, что
![]() .
.
OX:
![]() (1)
(1)
OY:
![]() (2)
(2)
Из уравнения (2) выразим T и подставим в уравнение (1).
![]() ;
; ![]() ,
,
![]() ;
;
![]() ,
,
![]() ;
;
т.к.
![]()
![]()
![]() .
.
Ответ: .