

2.2.4. Розрахунок необхідної кількості трамбовок
Для зворотного засипання пазух котловану обираємо бульдозер САТERPILLAR D9R , для ущільнення - ручні електротрамбовки марки ИЭ-4502.
Технічні характеристики бульдозера d9r: тип відвалу – неповоротний; висота відвалу – 1,3 м; довжина відвалу – 3 м; потужність – 120 квт;
Змінна продуктивність бульдозера складає: Прб = t*100/НВР = 8*100 / 0,38 = 2105,3 м3/зм;
Змінна продуктивність трамбовки складає: Пртр=t*100/НВР= 8*100 / 1,9 = 421 м3/зм;
Кількість трамбовок для спільної роботи з бульдозером: nтр=Прб/Пртр=2105,3/421 = 5 штук.
2.2.5. Вибір виду екскаваторного забою
На підставі розрахунку приймаємо до виконання робіт екскаватор ЭО–4121А.
Тому що розміри котловану перевищують максимально можливу ширину проходки, приймаємо схему переміщення екскаватора лобовою проходкою.
Максимально можлива ширина лобового забою по верху і по низу при першій проходці (рис.1):
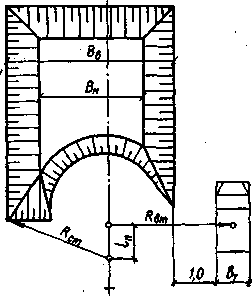
Рис. 1. Розрахункова схема першої екскаваторної проходки:
Вв — ширина проходки по верху; Вн — ширина проходки по низу.
а) ширина проходки по верху
![]()
б) ширина проходки по низу
![]()
де Rcт — радіус різання на рівні стоянки екскаватора (паспортні дані), м;
lп — довжина робочого пересування екскаватора, м;
Rвт — радіус вивантаження на транспорт (паспортні дані), м;
b — ширина самоскида (по краях коліс), м;
1,0 — запас за умовами техніки безпеки;
т — показник крутості укосу;
h — глибина котловану, м.
в) Ширина кожної наступної проходки (рис.2)
![]()
де Rн – максимальний радіус різання на рівні дна виїмки.
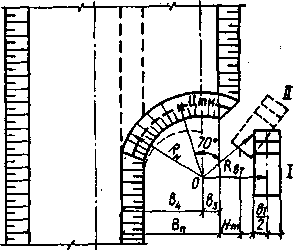
Рис. 2. Розрахункова схема кожної наступної екскаваторної проходки:
I і II — положення транспортного засобу при його завантаженні; Rн — максимальний радіус різання на рівні дна виїмки; Вп — ширина кожної наступної проходки; Н — глибина котловану; Rвт — радіус вивантаження на транспорт; bт — ширина транспортного засобу.
Для визначення Вп передбачається, що центр ваги кузова самосикда знаходиться напроти вертикальної осі екскаватора (положення I), середній кут повороту стріли (з урахуванням зсуву центра ваги забою) складає більш 90°.
Оптимальним же кутом повороту стріли екскаватора, при якому досягається найбільша продуктивність, вважається кут у 60—70°, тому самоскид встановлюють у положення II з дотриманням мір безпеки роботи (відстань від коліс до брівки котловану повинне бути не менш 1 м).
2.3. Технологія влаштування свайних фундаментів.
2.3.1. Вибір монтажного крана для віброзанурення армокаркасів проводимо за трьомя технічними характеристиками крана:
- Необхідна вантажопідйомність крана
![]()
де Qэл - маса найважчого елементу, т (віброзанурювач);
Qосн – маса монтажного пристосування, т
- Необхідна висота підйому гака крана
![]()
де: hо – перевищення опори елемента, що монтується над рівнем стоянки крана, м;
а – запас по висоті, м;
hстр – висота стропування, м;
hэл – висота елементу в монтажному положенні, м.
- Необхідний виліт стріли крана, м.
![]()
де: d – відстань від осі елемента, що монтується до брівки котловану по низу, м;
С – величина закладання укосу;
К – відстань від брівки котловану до ходової частини монтажного крану, м (К=2м);
В – база монтажного крана, м.
На підставі необхідних характеристик приймаємо до виконання робіт монтажний кран МКГ-25БР.