

1. Кинематика контактных систем

Рис. 2.4. Классификация контактов по способу нажатия:
а — жесткие без предварительного нажатия: б — эластичные без предварит
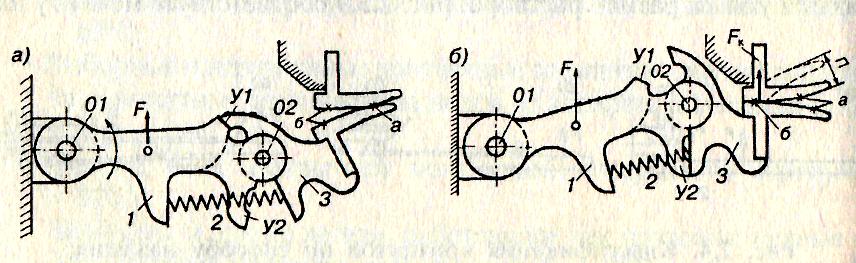
Операции включения и выключения разрывных контактов осуществляются воздействием соответствующего привода. Характер этого воздействия зависит от области применения контактов и их нагрузки. Различают по способу нажатия три вида подвижных контактов: жесткие без предварительного нажатия (рис. 2.4,д), эластичные без предварительного нажатия (рис. 2.4,6), с предварительным нажатием (рис. 2.4,в). Кинематическая схема должна обеспечивать определенное расстояние между подвижным и неподвижным контактами при полном их размыкании, называемое раствором Р (рис. 2.4.), а для контактов с предварительным нажатием — возможность перемещения подвижного контакта из положения первоначального соприкосновения контактов в положение предельного перемещения при устранении неподвижного контакта (это перемещение называют провалом) и необходимый перекат подвижного контакта по неподвижному в процессе притирания. Минимальный раствор ограничен условиями надежного дугогашения при малых токах. Провал должен обеспечивать надежную работу контактов при их износе либо необходимый процесс притирания контактов при их замыкании. Перекат, сопровождающийся небольшим скольжением подвижного контакта по неподвижному выбирают исходя из необходимости удаления рабочей поверхности соприкосновения от поверхности, связанной с дугой при размыкании контактов, и снятия окислов с контактов в процессе их замыкания. На рис. 2.5,я,б и в показаны различные положения подвижного и неподвижного линейных контактов в процессе включения. В положении, показанном на рис. 2.5,д контакты раздвинуты на размер раствора, рис. 2.5,6 соответствует моменту их соприкосновения в точке а, а рис. 2.5,в - окончанию процесса включения в точке б .При замыкании подвижный контакт катится по неподвижному и одновременно скользит по нему вправо, в результате чего расстояние перемещения по неподвижному контакту меньше, чем по подвижному. Величина скольжения примерно равна 10-25% траектории соприкосновения на неподвижном контакте:
 аб.
аб.
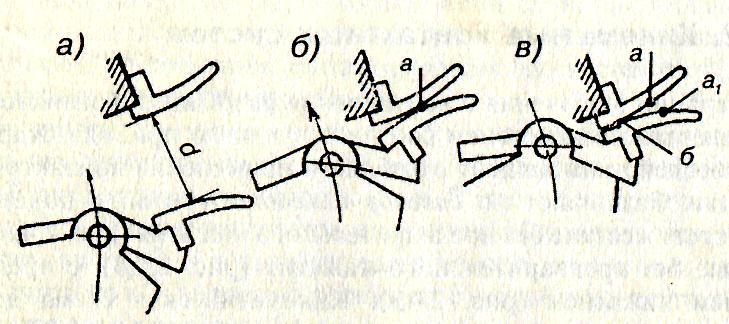
Рис. 2.5. Схема замыкания контактов
При меньших значениях скольжения поверхности зачищаются недостаточно, при больших происходит слишком быстрое их изнашивание. Для металлокерамических накладок значения Ск можно уменьшать на 25-30%.
2. Определение габаритных размеров ТЭД
Длина тягового электродвигателя ограничивается расстоянием между внутренними гранями колесных пар, которое для железных дорог равно 1,44 м. Однако здесь же необходимо разместить зубчатую передачу, предусмотреть необходимые технологические зазоры.
Ширина (диаметр) остова ТЭД связана с диаметром якоря соотношением:
BD = KD Da,
где КD – коэффициент пропорциональности, принимаем 1,5.
Тогда подставляя численные значения, получаем:
Максимально возможная ширина (диаметр) остова ограничивается величиной централи передачи и необходимостью размещения полого вала колесной пары, т.е.:

где d0 – диаметр полого вала
Высота остова обычно равна ширине и не должна быть больше:
HD max = D – 2(a’ - ),
где а’ – расстояние от нижней части станины двигателя до головки рельс,
- превышение оси вала электродвигателя над осью колесной пары,
Тогда подставляя численные значения, получаем:
Максимально возможный диаметр якоря определяется по следующей формуле:

Наружный диаметр станины (статора) генератора определяется по формуле:
Dст = КстDа
где Кст – коэффициент пропорциональности,
3. индивидуальные электропневматические и электромагнитные приводы тяговых аппаратов.
4. расчет параметров питающей пружины по кинематический схеме
5. Принцип работы системы и аппаратов защиты.
Под защитой понимают ограничение свободных процессов при их выходе в область аварийных или экстремальных режимов. Аварийные режимы возникают преимущественно в результате независимых внезапных или постепенных отказов отдельных элементов оборудования, которые вызывают зависимые отказы других элементов. Защита от аварийных режимов не предотвращает их возникновение, а лишь ограничивает последствия таких режимов тем сильнее, чем выше быстродействие осуществляющих ее аппаратов. Срабатывание их приводит к прекращению функционирования (выключению) защищаемой части оборудования или всего локомотива. Экстремальные режимы чаще всего связаны с работой оборудования в условиях более тяжелых, чем нормальные, например, при перегрузках, перенапряжениях и т. д., вызывающих с течением времени лишь постепенные отказы элементов оборудования. При этом аппараты защиты могут быть не столь быстродействующими, как для аварийных режимов, могут не прекращать функционирование оборудования, а лишь облегчать режимы работы. Например, возможен переход с позиций ослабленного возбуждения на полное, снижение интенсивности переключения пусковых или тормозных позиций и др.
Для аварийных режимов чаще применяют аппараты прямой защиты, для экстремальных — косвенной.
Аппараты прямой защиты не только контролируют состояние защищаемой цепи по какому-то заданному количественному показателю (распорядительная функция), но и по достижении его непосредственно воздействуют на защищаемую цепь. При аппаратах косвенной защиты распорядительные и исполнительные функции разделены между различными аппаратами.
Свойства аппаратов защиты оценивают определенными количественными показателями. В общем случае к ним относят номинальные значения параметров ( , и др.) цепей, для которых они предназначены, и значения времени, при которых аппарат должен сработать (особенно для быстродействующих аппаратов). Это время подразделяют на собственное , т. е. время движения подвижной части аппарата, и время гашения дуги . Для большой части аппаратов защиты имеет значение коэффициент регулирования, %,
Выбор необходимых видов аппаратов защиты производят па основании расчета или анализа опытных данных, характеризующих неустановившиеся процессы на э. п. с., для которого предназначен аппарат. Учитывают также надежность защищаемого оборудования.
Так, первоначально полупроводниковые преобразователи были ненадежны, а устройства их защиты сложны. По мере повышения надежности преобразователей упрощались их защиты.
Систему защиты формируют из отдельных аппаратов, составляющих единый комплекс, в котором отдельные аппараты могут «помогать» друг другу. Рассмотрим такое взаимодействие на примере защиты от коротких замыканий для электровозов постоянного тока. Для идеальной защиты необходимо установить в каждой параллельной цепи тяговых двигателей отдельный быстродействующий автоматический выключатель. Однако это сложно и дорого. Применяют лишь один аппарат с током уставки
Токи короткого замыкания зависят от того, на каком двигателе в их последовательной цепи оно произошло.
Наибольший толчок тока возможен в момент изменения напряжения, т. е. в первый момент к. з. Так как скорость и магнитный поток не успевают измениться, то
Как видим, , и аппарат защиты не сработает. Однако сработает дифференциальное токовое реле, если к. з. сопровождается (что наиболее вероятно) пробоем на корпус в отказавшем двигателе. Быстродействующий выключатель по сигналу этого реле сработает как аппарат не прямой защиты, а косвенной. В систему защиты входят главные выключатели силовых цепей, автоматические выключатели вспомогательных цепей и цепей управления, разрядники, реле различного назначения, плавкие предохранители, аппараты защиты преобразователей.
6. Неустановившиеся процессы в тяговых машинах
Различают два основных вида переходных процессов:
1) электромеханические;
2) электрические.
Электромеханические процессы связаны с изменением нагрузки на валу тягового двигателя. Они, как правило, протекают при постоянном напряжении. Например, увеличение тяговой силы электровоза при выходе с ровного участка на подъем. Ток в двигателе изменяется, но это постепенные изменения, которые, как правило, не приводят к серьезным последствиям. Значительно сложнее электрические переходные процессы.
Причем электрические переходные процессы так же можно разделить на две группы:
1) эксплуатационные;
2) аварийные.
К эксплуатационным переходным процессам относят: трогание с места и разгон электровоза, переход с одного соединения на другое, изменение степени ослабления поля и т. д. К аварийным – броски напряжения в контактной сети, потерю питания с последующим восстановлением, режимы короткого замыкания, в частности круговой огонь на коллекторе.
Особенно опасны резкие толчки напряжения или отрывы токоприемника от контактного провода.
Мгновенное
восстановление напряжения не сопровождается
мгновенным возрастанием магнитного
потока до
 .
Медленное нарастание магнитного потока
обеспечено вихревыми токами. При этом
ток двигателя мгновенно, или быстрее,
нарастает, чем поток и достигает величины
.
Медленное нарастание магнитного потока
обеспечено вихревыми токами. При этом
ток двигателя мгновенно, или быстрее,
нарастает, чем поток и достигает величины
 .
.
В связи с этим бросок тока сопровождается нарушением коммутационного процесса. Нарушение коммутационного процесса вызвано еще и тем, что вихревые токи препятствуют нарастанию тока в дополнительных полюсах, а значит, нарушается баланс между реактивной и компенсационной эдс.
Итак, мы опять столкнулись с влиянием вихревых токов, только теперь уже при переходных процессах.
7.Конструкция ТЭД. принцип расчета основных узлов ТЭД (якоря, якорных обмоток) Электродвигатель состоит из вращающейся части — якоря и неподвижной — остова. Рассмотрим элементы конструкции двухполюсного электродвигателя (рис. 4.21). Якорь выполнен в виде стального цилиндра 8 диаметром DЯ и длиной lЯ, набранного из отдельных листов специальной электротехнической стали и закрепленного на валу 11, в пазах которого расположено множество «рамок», образующих обмотку якоря 13. На валу якоря закреплен коллектор 2, представляющий собой- множество сегментов (.коллекторных пластин), изолированных друг от друга. «Рамки» подключены (припаяны) к коллекторным пластинам. При одной «рамке», рассмотренной выше, число коллекторных пластин — две. Напряжение U от источника электрической энергии подводится к коллектору 2 через угольные щетки 3, укрепленные в неподвижных щеткодержателях 4.
Вал якоря вращается в подшипниках 1 и 10, расположенных в подшипниковых щитах 9, закрывающих остов двигателя 6 с обеих сторон.
В остове двигателя укреплены сердечники главных полюсов 7, с помощью которых в воздушном зазоре между якорем и внутренними поверхностями сердечников образуется магнитное поле. Для его создания на сердечниках полюсов укреплены катушки 5, которые при протекании по ним тока создают магнитодвижущую силу (МДС), являющуюся причиной возникновения магнитного потока Ф (штриховые линии на рис. 4.21,6). Он замыкается по магнитной цепи машины, выполненной для увеличения магнитной проводимости из ферромагнитных материалов.
8. Магнитные усилители, принцип действия и области применения
Магнитным усилителем называется усилитель электрических сигналов, действие которого основано на использовании нелинейности характеристик ферромагнитных материалов. Магнитные усилители применяются в разнообразных устройствах: от точных измерительных приборов до схем автоматического управления крупными производственными агрегатами (прокатными станами, экскаваторами и т.п.). Широкое применение магнитных усилителей определяется рядом их достоинств:
дроссельный магнитный усилитель;
магнитный усилитель с самонасыщением (МУС).