

6.2 Різниці решітчастих функцій
Першою похідною безперервної функції f(x) називається відношення приросту функції до приросту аргументу, якщо він прямує до нуля:
 .
.
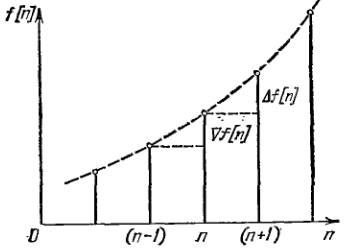
Якщо виконати дискретизацію безперервної функції, замінивши безперервний аргумент t на дискретний nT, де n = 0, 1, 2…N, T – період дискретизації, отримаємо дискретний аналог першої похідної – першу пряму різницю решітчастої функції:
 .
.
Аналогічно замінюються похідні другого і вищих порядків:

 .
.
Пряма
різниця записується моменту часу
 ,
якщо відомі значення функції
і
,
якщо відомі значення функції
і
 .
У випадку, коли відомі поточне
і попереднє
.
У випадку, коли відомі поточне
і попереднє
 значення функції, записується зворотна
різниця:
значення функції, записується зворотна
різниця:

Зворотні різниці другого і вищих порядків записуються за формулами:
 ,
,
 .
.
6.3 Різницеві рівняння
Різницеві рівняння за своїми властивостями та областями застосування досить близькі до диференціальних рівнянь. Відмінність полягає у тому, що диференціальні рівняння зв’язують значення функції та її похідних в один і той же момент часу:
 ,
,
а різницеві рівняння значення функції у різні моменти часу:
 .
.
Однорідне лінійне різницеве рівняння з постійними коефіцієнтами має вигляд:
 (1)
(1)
Отримати різницеві рівняння можна декількома способами:
дискретизацією звичайних диференціальних рівнянь;
складанням математичних моделей об’єктів з дискретним часом;
аналізом математичних рядів та рекурентних співвідношень.
Різницеві рівняння.
Різницеві рівняння за своїми властивостями та областями застосування досить близькі до диференціальних рівнянь. Відмінність полягає у тому, що диференціальні рівняння зв’язують значення функції та її похідних в один і той же момент часу:
 ,
,
а різницеві рівняння значення функції у різні моменти часу:
 .
.
Однорідне лінійне різницеве рівняння з постійними коефіцієнтами має вигляд:
 (1)
(1)
Отримати різницеві рівняння можна декількома способами:
дискретизацією звичайних диференціальних рівнянь;
складанням математичних моделей об’єктів з дискретним часом;
аналізом математичних рядів та рекурентних співвідношень.
Дискретизація диференціальних рівнянь
Приклад 1. Виконати дискретизацію диференціального рівняння.
 .
.
Замінимо першу та другу похідні відповідними різницями (2.4) і (2.5).
 ,
,
Зведемо подібні та отримаємо шукане різницеве рівняння:
 .
.
Різницеві
рівняння можна розглядати як рекурентні
співвідношення, що дозволяють обчислювати
значення
 при k
= 0, 1, 2… для заданих початкових значень
при k
= 0, 1, 2… для заданих початкових значень
 і рівняння виду (1)
і рівняння виду (1)
Z – перетворення. Загальні відомості.
Z-перетворенням (перетворенням
Лорана) називають згортання вихідного
сигналу, заданого послідовністю дійсних
чисел
у часовій області, в аналітичну
функцію
комплексної частоти. Якщо сигнал
являє імпульсну
характеристику
лінійної системи, то коефіцієнти
Z-перетворення показують відгук системи
на комплексні експоненти ![]() ,
тобто на гармонійні осциляції з різними
частотами і швидкостями наростання /
загасання.
,
тобто на гармонійні осциляції з різними
частотами і швидкостями наростання /
загасання.
Z-перетворення, як і багато інтегральних перетворень, може бути як одностороннє, так і двостороннє.