Вибір двигуна.
Метод
еквівалентного струму
Втрати
в двигунах приблизно пропорційні
квадрату струму в його обмотках. Знаючи
графік струму, що протікає по обмотках
двигуна, можна визначити для кожного
конкретного режиму роботи значення
струму I е, характеризує
його нагрів.
Еквівалентний
струм I е -
це такий незмінний за величиною струм,
який викликає такий же нагрів
електродвигуна, як і реально протікає
змінюється за величиною струм у
відповідності з графіком навантаження
механізму.
 (2.7)
Умова
перевірки двигуна на нагрів
буде:
(2.7)
Умова
перевірки двигуна на нагрів
буде:
![]() (2.8)
Формула
(2.8) справедлива, якщо постійні
втрати? Р з за
час циклу не змінюються, а також дотримані
умови, необхідні при застосуванні методу
середніх втрат.
(2.8)
Формула
(2.8) справедлива, якщо постійні
втрати? Р з за
час циклу не змінюються, а також дотримані
умови, необхідні при застосуванні методу
середніх втрат.
Метод
еквівалентного моменту
Якщо
момент двигуна пропорційний струму, то
можна користуватися методом еквівалентного
моменту.
Еквівалентний
момент - це такий постійний момент
навантаження, який викликає такий же
нагрів двигуна, як і реально змінюється
момент відповідно до графіка роботи
механізму.
 (2.9)
Умова
правильності вибору двигуна М е<=М н.
Цей
метод можна застосовувати для двигунів
постійного струму з незалежним збудженням,
для асинхронних двигунів та інших, коли
момент пропорційний струму, тобто
магнітний потік постійний.
(2.9)
Умова
правильності вибору двигуна М е<=М н.
Цей
метод можна застосовувати для двигунів
постійного струму з незалежним збудженням,
для асинхронних двигунів та інших, коли
момент пропорційний струму, тобто
магнітний потік постійний.
Метод
еквівалентної потужності
Якщо
швидкість двигуна змінюється мало і
можна вважати, що потужність пропорційна
моменту ![]() ,
То еквівалентна потужність
буде:
,
То еквівалентна потужність
буде:
 (2.10)
Проводити
перевірку двигуна на нагрів по
еквівалентній потужності можна для
нерегульованих за швидкістю електродвигунів,
у яких момент пропорційний току. Умова
правильності вибору електродвигуна
(2.10)
Проводити
перевірку двигуна на нагрів по
еквівалентній потужності можна для
нерегульованих за швидкістю електродвигунів,
у яких момент пропорційний току. Умова
правильності вибору електродвигуна ![]()
Загальні принципи побудови систем керування електроприводами.
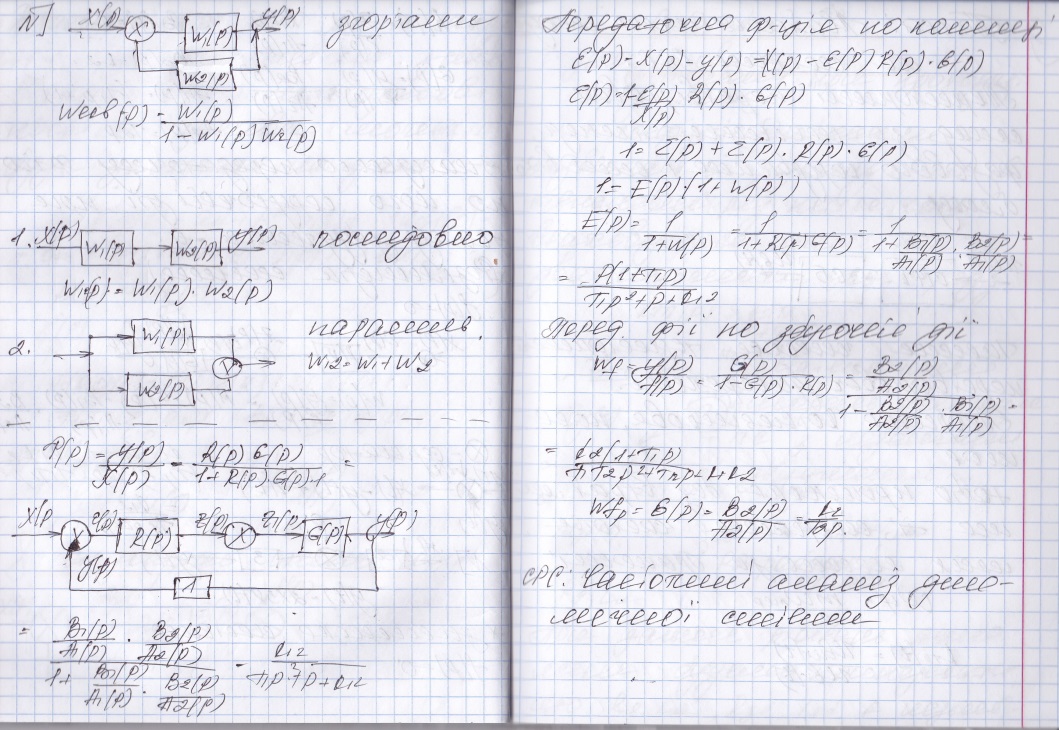
Математичні моделі складових системи керування електроприводами.
1) стабілізуючі –це автоматична система задача якої є підтримка регульованої змінної на заданому рівні. Х(t)=const, y(t)=const
2) програмні- це автоматична СКЕ ,задача якої є зміна регульованої змінної у(t) у відповідності за даним законом y(t) = Хn(t)
3) слідкуючі СКЕ-це автоматичні системи, задачою яких є зміна регульованої змінної з раніше не відомим характером

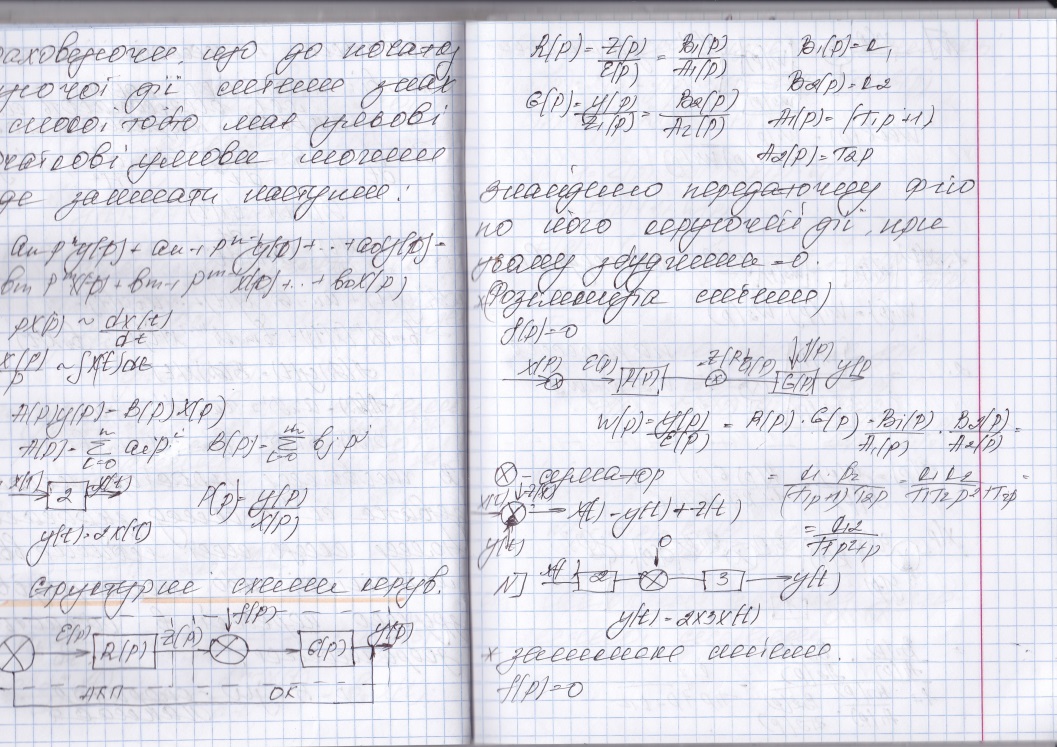
Х(t) y(t)

Система чорний ящик
Структурні схеми системи


Система регулювання кутової швидкості.
Кутова
швидкість ДПС з незалежним збудженням
визначається виразом
 звідки
випливає, що швидкість двигуна постійного
струму з незалежним збудженням можна
регулювати наступними трьома способами:
звідки
випливає, що швидкість двигуна постійного
струму з незалежним збудженням можна
регулювати наступними трьома способами:
зміною струму збудження І (магнітного потоку Ф) двигуна;
зміною опору кола якоря R за допомогоюрезисторів (реостатнерегулюванняшвидкості);
зміноюнапруги U, щопідводять до якоря двигуна.
Схеми включення, коефіцієнти підсилення оп.
Операційним називають диференційний підсилювач постійного струму з великим коефіцієнтом підсилення, виконаний у виді інтегральної мікросхеми. Термін операційний означає, що даний підсилювач може виконувати математичні операції. Термін диференційний означає, що такий підсилювач підсилює різницю вхідних сигналів. Тому операційний підсилювач має два входи і один вихід (див.рис.1). Один із входів називають неінвертуючим, так як вихідний сигнал знаходиться у фазі з вхідним. Другий вхід називають інвертуючим, так як вихідний сигнал знаходиться у протифазі з вхідним. Інвертуючий вхід ОП позначають знаком інверсії (рис.1). Операційний підсилювач складається з диференціального каскаду на вході, підсилювача напруги та вихідного каскаду, призначеного для підсилення потужності вихідного сигналу. Для живлення ОП використовують два різнополярних джерела живлення E1 та E2.
Ідеальний операційний підсилювач характеризується такими параметрами:
- нескінченно великий коефіцієнт підсиленняku=;
- нескінченно великий вхідний опір Rвх=;
- нульовий вихідний опір Rвих=0.

Реальні операційні підсилювачі мають коефіцієнт підсилення ku=103-106, вхідний опір складає сотні - тисячі кілоом, а вихідний - десятки-сотні ом. Інтегральні ОП є універсальними. Вони можуть виконувати не тільки математичні операції, але і застосовуватись в різних генеруючих, підсилюючих та перетворюючих сигнали пристроях. Результуючі характеристики пристроїв, побудованих на операційних підсилювачах, повністю визначаються параметрами зовнішніх зворотних звязків.
Основні схеми включення ОП Велика різноманітність схем включення ОП можна звести до декількох типових структурних схем, що представляють собою ОП з одним або декількома багатополюсниками. На рис. 4.1, а показана найбільш загальна структурна схема пристрою, у якому ОП працює без синфазних вхідних сигналів. Коефіцієнт передачі для даної схеми можна виразити через Y-параметри багатополюсника в такий спосіб:
(3.1) Рис. 3.1.
Схеми включення ОП в інвертованому режимі.
Нарис.3.1, б, в, г, дпоказанісхемивключенняОП, якіпредставляютьдеяківипадкисхемирис. 3.1, а.
Для цих схем коефіцієнт передачі можна записати в наступному вигляді:
- для схеми рис. 3.1, б K(p)= - Y31/Y32
- для схеми рис. 3.1, в K(p)= - -
для схеми рис. 3.1, г K(p)=
- для схеми рис. 3.1, д
K(p)= Рис.3.2
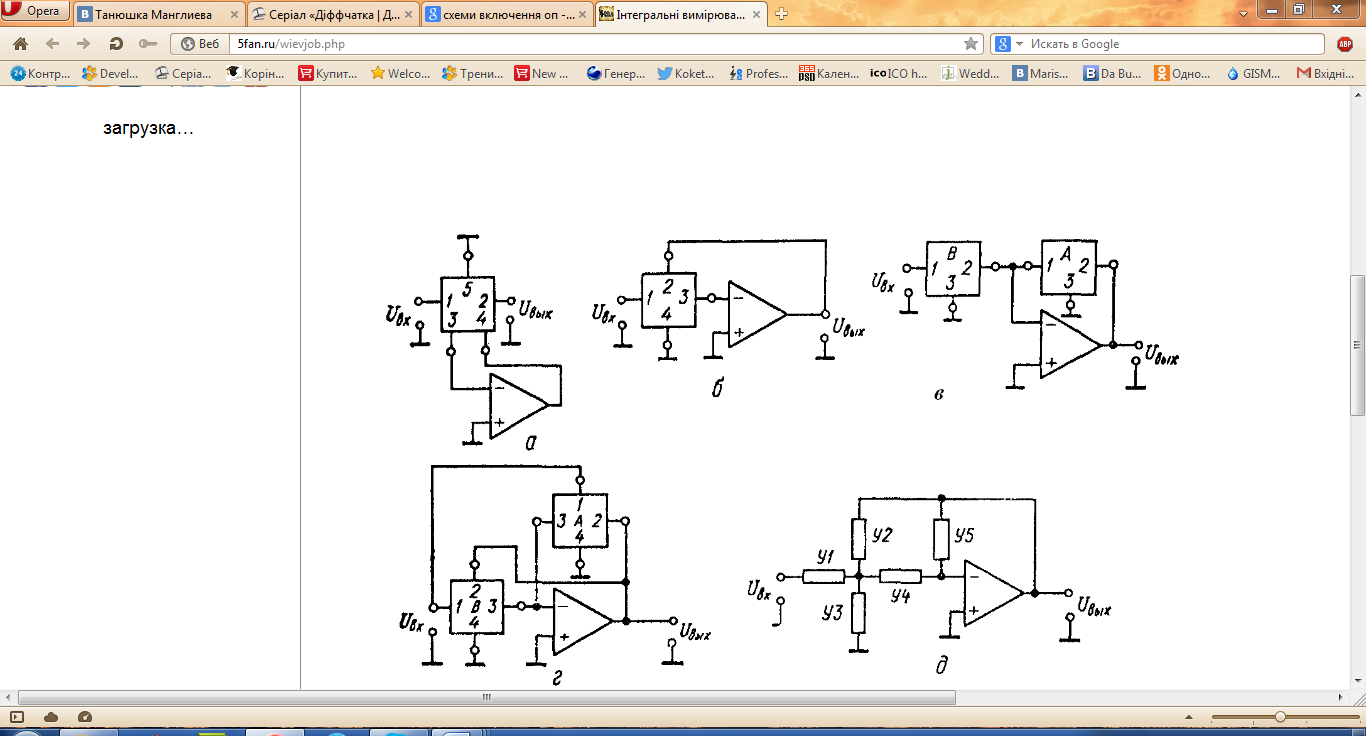
Схеми включення ОП в інвертуючому режимі.
На рис. 3.2, а показана структурна схема приладу, в якому ОП працює з синфазними вхідними сигналами. Коефіцієнт передачі для даної схеми можна подати в наступному вигляді :
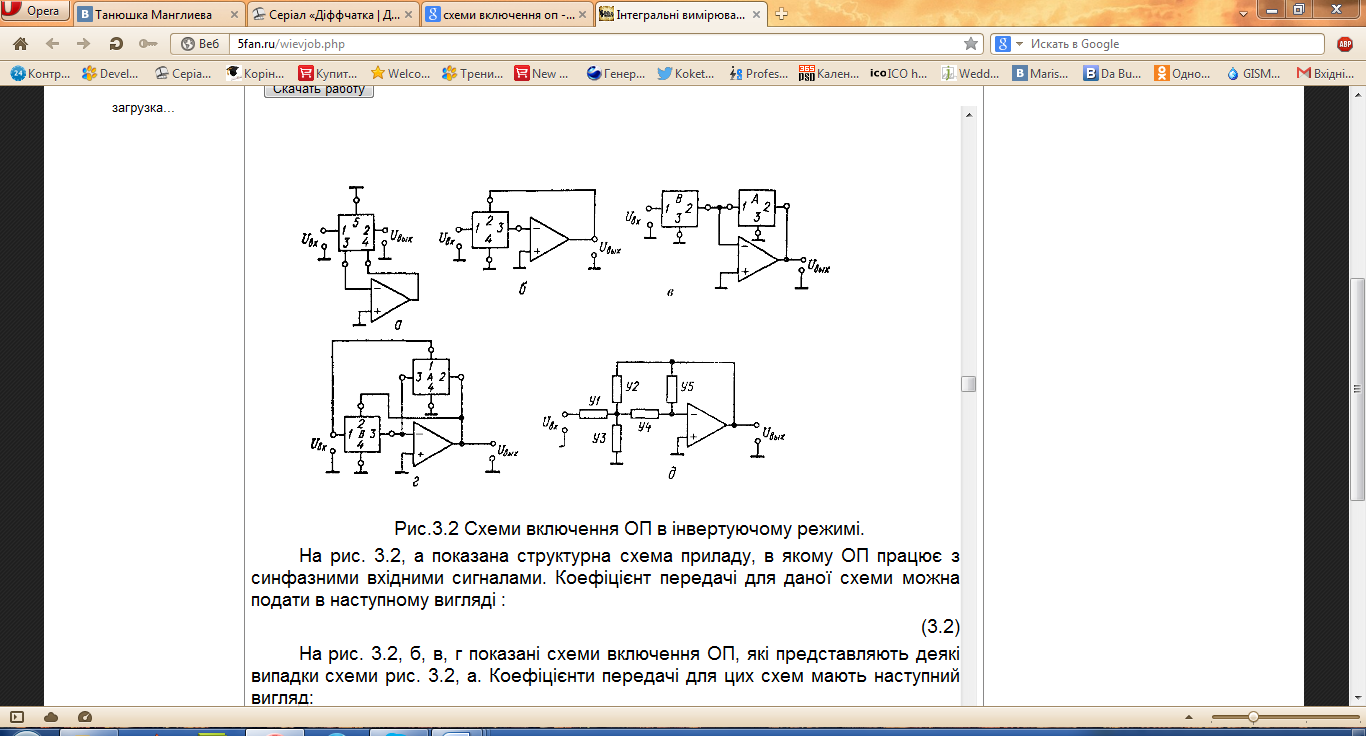 (3.2)
(3.2)
На рис. 3.2, б, в, г показані схеми включення ОП, які представляють деякі випадки схеми рис. 3.2, а.
Коефіцієнтипередачідляцихсхеммаютьнаступнийвигляд: - длясхемирис. 3.2, бK(p)=
- для схеми рис. 3.2, в K(p)=
- для схеми рис. 3.2, г K(p)=
Всі вищевказані формули для коефіцієнтів передач дані для лінійного режиму роботи ОП. Визначення У-параметрів багатополюсників і оцінку похибок функціональних вузлів проводять по відомим методикам.
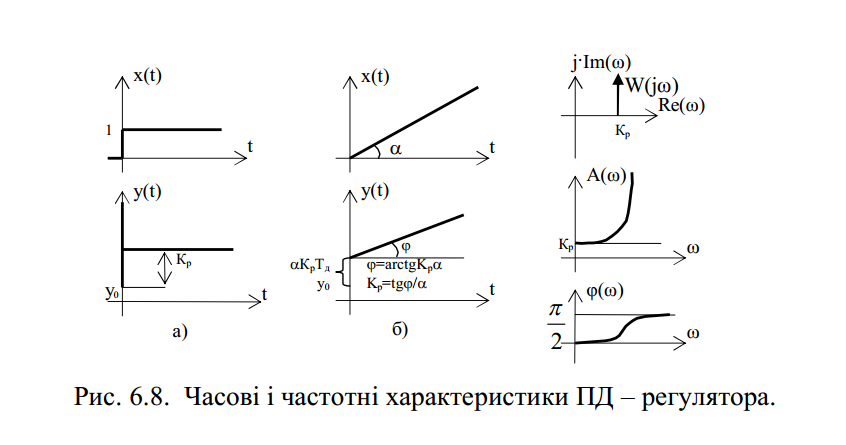
 П
– регулятора на ОП.
П
– регулятора на ОП.І – регулятора на ОП.
Д – регулятора на ОП.
ПІ – регулятор на ОП.