

Запитання колоквіум 2 модуль
Математична частина електропривода.


Типові навантаження.
Навантаження, які діють на окремі елементи машини, поділяють на корисні та власні (шкідливі).
Корисні навантаження сприяють реалізації машиною виробничого процесу. Власні навантаження неминуче супроводжують роботу машини і в основному складаються із власної ваги окремих ланок, динамічних сил, сил тертя в з'єднаннях і місцевих сил, спричинених концентрацією навантаження на поверхні контакту деталей. Природно, що не всі сили власної ваги і динамічні сили шкідливі. В машинах ударної (молотах) і вібраційної дії динамічні навантаження використовують для здійснення корисного робочого процесу. Власна вага може також виконувати позитивну роль (наприклад, противага в підйомно–транспортних машинах) або здійснювати робочі функції (у гиревих приладах часу).
За характером зміни в часі навантаження в машинах поділяють на постійні і змінні.
Постійні навантаження – це в більшості випадків сили тиску рідини або газу, навантаження від початкового попереднього напруження деталей при їх з'єднанні в процесі складання, а також власна вага. До цих же навантажень належать і постійні протягом значного періоду або циклу роботи навантаження, характерні для робочого режиму експлуатації машини. Власна вага має основне значення в транспортних і підйомно–транспортних машинах, в установках для буріння глибоких свердловин та інших машинах. Такі навантаження суттєві для опор важких зрівноважених роторів.
Змінні навантаження можуть бути спричинені нерівномірністю робочого процесу в машинах–двигунах (наприклад, у двигунах внутрішнього згоряння); внутрішньою динамікою роботи (запуск у роботу, гальмування, реверсування, незрівноваженість, неточність виготовлення); зміною робочого процесу машини через збільшення чи зменшення сил корисного опору та ін.
Змінні навантаження можуть бути стаціонарними або нестаціонарними.
Нестаціонарні – це навантаження із змінними параметрами (амплітудою і частотою). Значна кількість машин працює в умовах нестаціонарного навантаження їхніх елементів.
На рис. 2.3 наведені графіки типових режимів навантаження машин, що побудовані в системі відносних координат Fі/F і пці/n∑. Тут взято такі позначення: П – постійний режим навантаження; В – важкий режим; СР – середній рівноймовірний режим; СН – середній нормальний режим, Л – легкий режим навантаження.
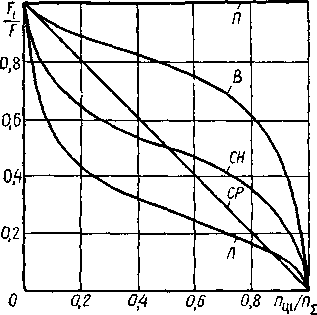
Рис. 2.3. Графіки типових режимів навантаження елементів машин
Рівняння руху електропривода.
Рівняння
руху електроприводу має враховувати
всі сили і моменти, що діють в перехідних
режимах.
При
поступальному русі рушійна сила F завжди
врівноважується силою опору машини F c і
інерційної силою ![]() , Що
виникає при змінах швидкості. Якщо маса
тіла m виражена
в кілограмах, а швидкість V -
В метрах в секунду, то сила інерції, як
і інші сили, що діють в робочій машині,
вимірюються в ньютонах (кг * м *
с -2).
Згідно
з викладеним рівняння рівноваги сил
при поступальному русі записується
так:
, Що
виникає при змінах швидкості. Якщо маса
тіла m виражена
в кілограмах, а швидкість V -
В метрах в секунду, то сила інерції, як
і інші сили, що діють в робочій машині,
вимірюються в ньютонах (кг * м *
с -2).
Згідно
з викладеним рівняння рівноваги сил
при поступальному русі записується
так:
![]() .
(2.22)
Аналогічно
рівняння рівноваги моментів, Нм, для
обертального руху (рівняння руху привода)
має наступний вигляд:
.
(2.22)
Аналогічно
рівняння рівноваги моментів, Нм, для
обертального руху (рівняння руху привода)
має наступний вигляд:
![]() . (2.23)
Рівняння
(2.23) показує, що розвивається двигуном
поводить момент М врівноважується
моментом опору М c на
його валу і інерційним або динамічним
моментом
. (2.23)
Рівняння
(2.23) показує, що розвивається двигуном
поводить момент М врівноважується
моментом опору М c на
його валу і інерційним або динамічним
моментом ![]() .
У (2.22) і (2.23) прийнято, що
маса
тіла т і
відповідно момент інерції приводу
.
У (2.22) і (2.23) прийнято, що
маса
тіла т і
відповідно момент інерції приводу ![]() є
постійними, що справедливо для значного
числа виробничих механізмів. З аналізу
(2.23) видно:
при
є
постійними, що справедливо для значного
числа виробничих механізмів. З аналізу
(2.23) видно:
при ![]() >
> ![]()
![]() ,
Тобто має місце прискорення
приводу;
при
<
,
Тобто має місце прискорення
приводу;
при
< ![]() ,
Тобто має місце уповільнення приводу
(очевидно, що уповільнення приводу може
бути і при негативному значенні моменту
двигуна);
при
,
Тобто має місце уповільнення приводу
(очевидно, що уповільнення приводу може
бути і при негативному значенні моменту
двигуна);
при ![]() =
= ![]() ;
В даному випадку привід працює в сталому
режимі.
;
В даному випадку привід працює в сталому
режимі.