

Кількість знімків в маршруті визначається за формулою:
L
![]() q
= +
3
=
q
= +
3
=
bs
44,7
![]() 2,16
2,16
+ 3 = 23,694 ≈ 24, (2.4)
де L – довжина маршруту на карті (в см) між західною та східною рамка- ми (або краями) ділянки.
Кількість знімків на всю ділянку N обчислюють за формулою
N = cq = 6 ∙ 24 = 144. (2.5)
Зони поперечного перекриття. Після нанесення на карту осей марш- рутів та базисів фотографування, наносять зони поперечного перекриття, для чо- го від осей маршрутів з обох сторін вгору і вниз відкладають відрізок l'(рис.2.1), який вираховують за формулою:
l m
![]() lr
= =
2
M
lr
= =
2
M
18 5400
![]()
![]() ∙
∙
2 10000
= 4,50 (см). (2.6)
Зони поперечного перекриття ілюмінуються світло-жовтим кольором, не заштриховуються.
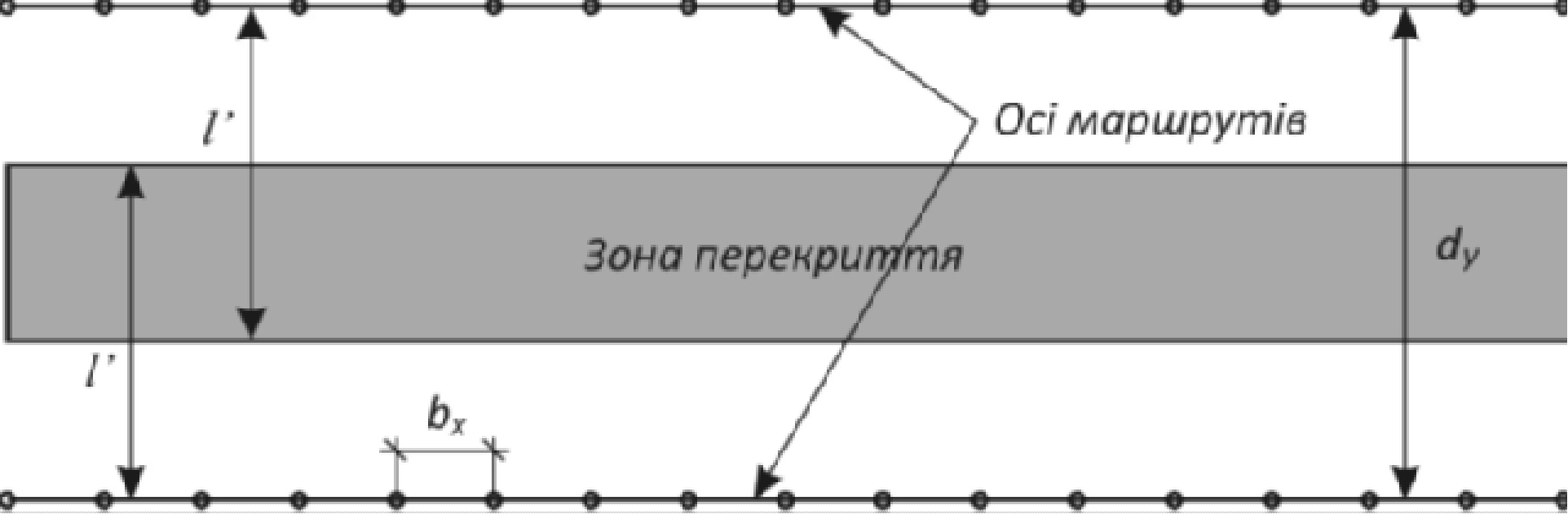
Рис. 2.1 Нанесення маршрутів, базисів фотографування та зон перекриття
Складання схеми розташування планово-висотних опознаків на карті масштабу 1:10000
ОПВ проектують в кожній зоні поперечного перекриття рядами (бажано по лінії центрів аерофотознімків) згідно з вимогами «Інструкції…» для масштабу 1:2000.
Існує дві схеми розміщення ОПВ: стандартна – кожна початкова і кінцева стереопара повинна мати в зоні перекриття по два ОПВ (в населених пунктах проектуються контрольні ОПВ); довільна – ОПВ розміщують рівномірно на площі і по периметру об’єкту (не рідше, ніж через 6-8 базисів та через 1-2 марш- рути).
Для опознаків вибирають чіткі, добре розпізнані контури (перетини доріг, кути сільськогосподарських угідь, кути капітальних споруд та інші елементи си- туації). Якщо в зонах перекриття немає добре розпізнаних контурів, то опознаки намічають в потрібних місцях, вважаючи, що вони перед зальотами будуть мар- куватися.
Суть маркування полягає в тому, що навколо закріпленої на місцевості точки влаштовують обкопування або обсипання піском чи крейдою (при наявно- сті) у вигляді трикутника, квадрата, хреста і т.д. Таке маркування можна буде розпізнати на фотознімку.
ОПВ слід розміщувати від краю об’єкта (карти) не далі, як на два базиси. Не слід проектувати ОПВ надто близько до краю зони перекриття, оскільки під
впливом вітру літак іноді може відхилятись від маршруту і тоді опознак виявить- ся не в зоні поперечного перекриття.
Запроектовані ОПВ нумерують зліва направо, починаючи з північно- західного кута карти. Наприклад, ОПВ-1, ОПВ-2 і т.д.
Далі ОПВ групують за типами контурів місцевості та потребою в марку- ванні. Результат записують в таблицю (табл.2.1).
Таблиця 2.1- Характеристика запроектованих опознаків
Назва ОПВ |
Маркування |
Опис |
ОПВ-01 |
ні |
На куті будинку |
ОПВ-02 |
так |
На дорозі |
ОПВ-03, ОПВ-4, ОПВ-06, ОПВ-8, ОПВ-9, ОПВ-10, ОПВ-11, ОПВ-12, ОПВ-13, ОПВ-14 |
так |
На пагорбі |
ОПВ-05, ОПВ-07 |
ні |
Перехрестя доріг |