

Расчет передачи от двигателя на лебедку
Буровой станок ЗИФ-1200МР (Рис.2) является шпиндельным станком моноблочной компоновки с продольным расположением лебедки и системой гидравлической подачи бурового инструмента.
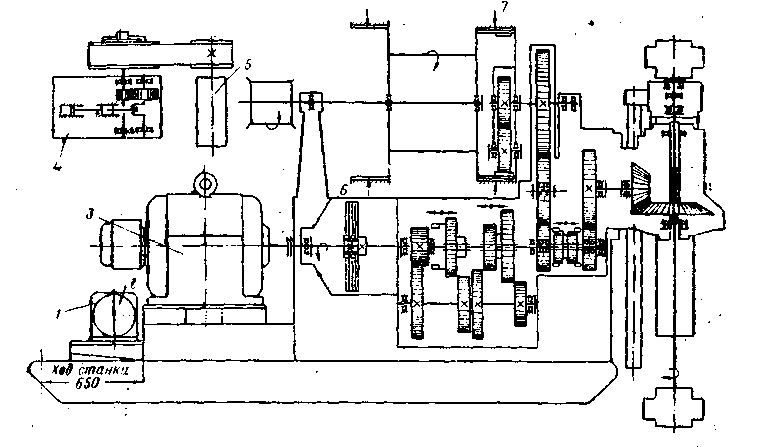
Рис.2 Кинематическая схема станка ЗИФ-1200МР:
1 – лопастный насос; 2 – асинхронный двигатель АО51-6; 3 – асинхронный двигатель; 4 – насос грязевой; 5 – асинхронный двигатель А-72В; 6 – тормоз спуска; 7 – тормоз подъема.
Привод бурового станка осуществлен соединением фрикциона с валом электродвигателя. Промывочные насосы приводятся от индивидуальных электродвигателей ременной передачей с передаточным отношением 1:2,4
Технические характеристики привода станка ЗИФ-1200МР представлены ниже.
Таблица 1. Привод станка ЗИФ-1200МР
-
Тип двигателя
Электродвигатель АК-2-91-6
Мощность, кВт
55
Частота вращения, об/мин
960
Коробка скоростей станка передает вращение от электродвигателя вращателю и лебедке. Коробка передач является четырехскоростной с прямой передачей на четвертой скорости.
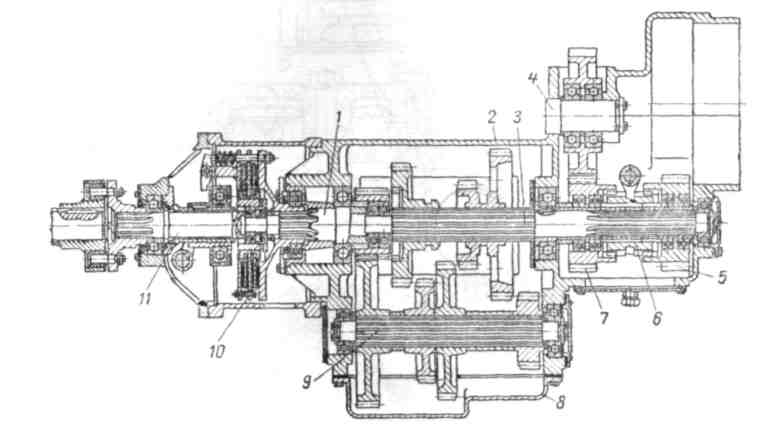
Рис. 3 Коробка скоростей бурового агрегата ЗИФ-1200МР
1-первичный вал; 2-корпус коробки; 3-вторичный вал; 4-ось паразитной шестерни; 5-шестерня для передачи вращения на шпиндель; 6-двусторонняя муфта включения лебедки и шпинделя; 7-шестерня для привода лебедки; 8-поддон; 9-промежуточный вал; 10-главный фрикцион; 11-вал фрикциона.
Конструкция коробки передач позволяет передавать от электродвигателя на барабан лебедки четыре ступени вращения в диапазоне 0,8 – 3,6 м/сек. Все зацепления шестерен и зубчатых колес – цилиндрические прямозубые. Поэтому весь расчет будет сведен к нахождению трех основных параметров:
Определить вращающие моменты в каждом последовательном зацеплении;
Определить усилия, действующие в каждом зацеплении;
Определить грузоподъемную силу при всех четырех скоростях подъема.
Зацепление шестерен на различных режимах работы коробки передач приведено в табл.2.
Таблица 2. Кинематическая характеристика бурового станка ЗИФ-1200МР
Ступени передач |
Шестерни, находящиеся в зацеплении при передаче на лебедку |
Частота вращения барабана лебедки, об/мин |
Скорость подъема колонны, м/с |
I |
|
42,3 |
0,41 |
II |
|
88,7 |
0,86 |
III |
|
140,0 |
1,36 |
IV |
|
186,5 |
1,81 |
Рассмотрим I
скорость передачи. При таком
зацеплении получаем 5ти ступенчатый
редуктор. КПД отдельных звеньев
кинематической цепи равны: для зубчатого
цилиндрического зацепления
![]() =
0,96…0,98; для планетарного редуктора:
=
0,85…0,95. Тогда общий КПД такой передачи
будет равно:
=
0,96…0,98; для планетарного редуктора:
=
0,85…0,95. Тогда общий КПД такой передачи
будет равно:
![]() (1.1)
(1.1)
![]()
Тогда мощность на выходе с учетом КПД:
![]() (1.2)
(1.2)
![]()
Рассмотрим каждое зацепление в отдельности.
I.
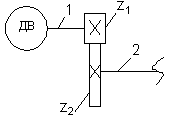
где Z1 и Z2
– количество зубьев на шестерне и
зубчатом колесе соответственно, Z1=
20 и Z2= 42 ; 1 и 2 –
ведущий и ведомый вал. Передаточное
число:
![]()
Частота вращения двигателя равна
![]() ,
или, если перевести в рад/с:
,
или, если перевести в рад/с:
![]() ,
тогда на выходе частота вращения будет
равна:
,
тогда на выходе частота вращения будет
равна:
![]()
![]()
Вращающий момент на валах привода равен:
На входе:
![]()
На выходе:
![]()
Силы, действующие в зацеплении, принято прикладывать в полюсе зацепления. Нормальную силу, направленную по линии зацепления как общей нормали к рабочим поверхностям зубьев, переносят в полюс и раскладывают на окружную и радиальную.
Окружная сила:
![]() (1.3)
(1.3)
где Т2 – момент на колесе,
![]() -
делительный диаметр зубчатого колеса,
-
делительный диаметр зубчатого колеса,
![]()
=![]() ,
,
Подставляя значения, получаем:
![]()
Радиальная сила:
![]() (1.4)
(1.4)
где
![]() -
стандартный угол отклонения нормали
от горизонта,
=
200;
-
стандартный угол отклонения нормали
от горизонта,
=
200;
Подставляя значения, получаем:
![]()
Тогда нормальная сила, или как ее еще называют касательная сила, будет равна:
![]() (1.5)
(1.5)
Подставляя ранее полученные значения, находим:
![]()
II.
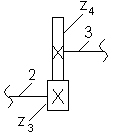
Z3= 20 и Z4=
42. Передаточное число:
![]()
Частота вращения
![]() ,
тогда на выходе частота вращения будет
равна:
,
тогда на выходе частота вращения будет
равна:
![]()
Вращающий момент на валах привода равен:
На входе:
![]()
На выходе:
![]()
Окружная сила:
![]()
где
![]() ,
,
Радиальная сила:
![]()
где - стандартный угол отклонения нормали от горизонта, = 200;
Тогда нормальная сила будет равна:
![]()
III.
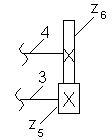
Z5= 26 и Z6=60.
Передаточное число:
![]()
Частота вращения
![]() ,
тогда на выходе частота вращения будет
равна:
,
тогда на выходе частота вращения будет
равна:
![]()
Вращающий момент на валах привода равен:
На входе:
![]()
На выходе:
![]()
Окружная сила:
![]()
где
![]() ,
,
Радиальная сила:
![]()
где - стандартный угол отклонения нормали от горизонта, = 200;
Тогда нормальная сила будет равна:
![]()
IV.
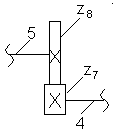
Z7= 39 и Z8=
47. Передаточное число:
![]()
Частота вращения
![]() ,
тогда на выходе частота вращения будет
равна:
,
тогда на выходе частота вращения будет
равна:
![]()
Вращающий момент на валах привода равен:
На входе:
![]()
На выходе:
![]()
Окружная сила:
![]()
где
![]() ,
,
Радиальная сила:
![]()
где - стандартный угол отклонения нормали от горизонта, = 200;
Тогда нормальная сила будет равна:
![]()
V.
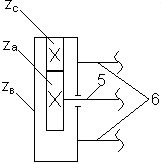
Zа- число зубьев солнечной шестерни, Zа = 45; Zс – число зубьев сателлитов, Zс = 18; Zв- число зубьев венцового колеса, Zв = 81; количество сателлитов n = 3.
Последнее зацепление – планетарная зубчатая передача. Ее расчет будет отличаться от всех остальных.
5 и 6 – ведущий и ведомый вал-барабан
лебедки. Частота вращения ведущего вала
равна
![]() ,
тогда на выходе частота вращения будет
равна:
,
тогда на выходе частота вращения будет
равна:
![]()
Передаточное число:
![]()
Вращающий момент равен:
На лебедке:
![]()
Окружная сила :
![]() (1.6)
(1.6)
где Та – момент на солнечной
шестерне,
![]() -
делительный диаметр солнечной шестерни,
-
делительный диаметр солнечной шестерни,
![]() ;
;
![]() -
коэффициент, учитывающий неравномерность
распределения нагрузки между сателлитам,
=
1,15;
-
коэффициент, учитывающий неравномерность
распределения нагрузки между сателлитам,
=
1,15;
![]() -
число сателлитов,
=
3.
-
число сателлитов,
=
3.
Подставляя значения, получаем:
![]()
Радиальная и нормальная нагрузки при известной окружной силе определяются также, как и в простых задачах. Радиальная сила:
![]()
где - стандартный угол отклонения нормали от горизонта, = 200;
Подставляя значения, получаем:
![]()
Тогда нормальная сила, или как ее еще называют касательная сила, будет равна:
Подставляя ранее полученные значения, находим:
![]()
Грузоподъемность лебедки при 1 скорости передачи:
![]() (1.7)
(1.7)
где
![]() -
мощность двигателя, не превышающая
0,7-0,8 номинальной величины;
-КПД
передачи от двигателя к лебедке станка;
-
мощность двигателя, не превышающая
0,7-0,8 номинальной величины;
-КПД
передачи от двигателя к лебедке станка;
![]() -1-я
скорость подъема. Подставляя численные
значения, получаем:
-1-я
скорость подъема. Подставляя численные
значения, получаем:
![]() .
.
Рассмотрим II скорость передачи. Аналогично выше решенной задаче рассмотрим все остальные передачи без эскизов.
I. Z1= 20 и Z2= 42. Передаточное число:
Частота вращения
![]() ,
тогда на выходе частота вращения будет
равна:
,
тогда на выходе частота вращения будет
равна:
![]()
Вращающий момент на валах привода равен:
На входе:
![]()
На выходе:
![]()
Окружная сила:
![]()
где
![]() .
.
Радиальная сила:
![]()
где - стандартный угол отклонения нормали от горизонта, = 200;
Тогда нормальная сила будет равна:
![]()
II.Z3=
31 и Z4=31. Передаточное
число:
![]()
Частота вращения , тогда на выходе частота вращения будет равна:
![]()
Вращающий момент на валах привода равен:
На входе:
![]()
На выходе:
![]()
Окружная сила:
![]()
где
![]() ,
,
Радиальная сила:
![]()
где - стандартный угол отклонения нормали от горизонта, = 200;
Тогда нормальная сила будет равна:
![]()
III.Z5= 26 и Z6=60. Передаточное число:
Частота вращения
![]() ,
тогда на выходе частота вращения будет
равна:
,
тогда на выходе частота вращения будет
равна:
![]()
Вращающий момент на валах привода равен:
На входе:
![]()
На выходе:
![]()
Окружная сила:
![]()
где ,
Радиальная сила:
![]()
где - стандартный угол отклонения нормали от горизонта, = 200;
Тогда нормальная сила будет равна:
![]()
IV.Z7= 39 и Z8= 47. Передаточное число:
Частота вращения
![]() ,
тогда на выходе частота вращения будет
равна:
,
тогда на выходе частота вращения будет
равна:
![]()
Вращающий момент на валах привода равен:
На входе:
![]()
На выходе:
![]()
Окружная сила:
![]()
где ,
Радиальная сила:
![]()
где - стандартный угол отклонения нормали от горизонта, = 200;
Тогда нормальная сила будет равна:
![]()
V. Zа = 45; Zс = 18; Zв = 81; количество сателлитов n = 3.
Частота вращения ведущего вала равна
![]() ,
тогда на выходе частота вращения будет
равна:
,
тогда на выходе частота вращения будет
равна:
![]()
Передаточное число:
![]()
Вращающий момент равен:
На лебедке:
![]()
Окружная сила:
![]()
где ;
Радиальная сила:
![]()
где - стандартный угол отклонения нормали от горизонта, = 200;
Тогда нормальная сила, или как ее еще называют касательная сила, будет равна:
![]()
Грузоподъемность лебедки при 2 скорости передачи:
![]()
где
-
мощность двигателя, не превышающая
0,7-0,8 номинальной величины;
-КПД
передачи от двигателя к лебедке станка;
![]() -2-я
скорость подъема. Подставляя численные
значения, получаем:
-2-я
скорость подъема. Подставляя численные
значения, получаем:
![]() .
.
Рассмотрим III скорость передачи.
I. Z1= 20 и Z2= 42. Передаточное число:
Частота вращения , тогда на выходе частота вращения будет равна:
Вращающий момент на валах привода равен:
На входе:
На выходе:
![]()
Окружная сила:
где .
Радиальная сила:
где - стандартный угол отклонения нормали от горизонта, = 200;
Тогда нормальная сила будет равна:
II.Z3=
38 и Z4=24. Передаточное
число:
![]() .
Следовательно, 2 зацепление играет роль
не редуктора, а мультипликатора.
.
Следовательно, 2 зацепление играет роль
не редуктора, а мультипликатора.
Частота вращения , тогда на выходе частота вращения будет равна:
![]()
Вращающий момент на валах привода равен:
На входе:
На выходе:
![]()
Окружная сила:
![]()
где
![]() ,
,
Радиальная сила:
![]()
где - стандартный угол отклонения нормали от горизонта, = 200;
Тогда нормальная сила будет равна:
![]()
III.Z5= 26 и Z6=60. Передаточное число:
Частота вращения
![]() ,
тогда на выходе частота вращения будет
равна:
,
тогда на выходе частота вращения будет
равна:
![]()
Вращающий момент на валах привода равен:
На входе:
![]()
На выходе:
![]()
Окружная сила:
![]()
где ,
Радиальная сила:
![]()
где - стандартный угол отклонения нормали от горизонта, = 200;
Тогда нормальная сила будет равна:
![]()
IV.Z7= 39 и Z8= 47. Передаточное число:
Частота вращения
![]() ,
тогда на выходе частота вращения будет
равна:
,
тогда на выходе частота вращения будет
равна:
![]()
Вращающий момент на валах привода равен:
На входе:
![]()
На выходе:
![]()
Окружная сила:
![]()
где ,
Радиальная сила:
![]()
где - стандартный угол отклонения нормали от горизонта, = 200;
Тогда нормальная сила будет равна:
![]()
V. Zа = 45; Zс = 18; Zв = 81; количество сателлитов n = 3.
Частота вращения ведущего вала равна
![]() ,
тогда на выходе частота вращения будет
равна:
,
тогда на выходе частота вращения будет
равна:
![]()
Передаточное число:
![]()
Вращающий момент равен:
На лебедке:
![]()
Окружная сила:
![]()
где ;
Радиальная сила:
![]()
где - стандартный угол отклонения нормали от горизонта, = 200;
Тогда нормальная сила, или как ее еще называют касательная сила, будет равна:
![]()
Грузоподъемность лебедки при 3 скорости передачи:
![]()
где
-
мощность двигателя, не превышающая
0,7-0,8 номинальной величины;
-КПД
передачи от двигателя к лебедке станка;
![]() -3-я
скорость подъема. Подставляя численные
значения, получаем:
-3-я
скорость подъема. Подставляя численные
значения, получаем:
![]() .
.
Рассмотрим IV скорость передачи. При IV скорости передачи получаем 3х ступенчатый редуктор, а весь расчет аналогичен предыдущему.
I.Z5= 26 и Z6=60. Передаточное число:
Частота вращения двигателя равна
![]() ,
тогда на выходе частота вращения будет
равна:
,
тогда на выходе частота вращения будет
равна:
![]()
Вращающий момент на валах привода равен:
На входе:
На выходе:
![]()
Окружная сила:
![]()
где
![]() ,
,
Радиальная сила:
![]()
где - стандартный угол отклонения нормали от горизонта, = 200;
Тогда нормальная сила будет равна:
![]()
II.Z7= 39 и Z8= 47. Передаточное число:
Частота вращения
![]() ,
тогда на выходе частота вращения будет
равна:
,
тогда на выходе частота вращения будет
равна:
![]()
Вращающий момент на валах привода равен:
На входе:
![]()
На выходе:
![]()
Окружная сила:
![]()
где ,
Радиальная сила:
![]()
где - стандартный угол отклонения нормали от горизонта, = 200;
Тогда нормальная сила будет равна:
![]()
III. Zа = 45; Zс = 18; Zв = 81; количество сателлитов n = 3.
Частота вращения ведущего вала равна
![]() ,
тогда на выходе частота вращения будет
равна:
,
тогда на выходе частота вращения будет
равна:
![]()
Передаточное число:
![]()
Вращающий момент равен:
На лебедке:
![]()
Окружная сила:
![]()
где ;
Радиальная сила:
![]()
где - стандартный угол отклонения нормали от горизонта, = 200;
Тогда нормальная сила, или как ее еще называют касательная сила, будет равна:
![]()
Грузоподъемность лебедки при 4 скорости передачи:
где
-
мощность двигателя, не превышающая
0,7-0,8 номинальной величины;
-КПД
передачи от двигателя к лебедке станка,
![]() ;
;
![]() -4-я
скорость подъема. Подставляя численные
значения, получаем:
-4-я
скорость подъема. Подставляя численные
значения, получаем:
![]() .
.